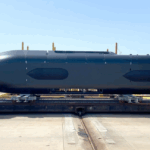

Phao thủy âm vô tuyến (sonobuoy) là một chiếc phao tương đối nhỏ – thường có đường kính 13 cm và dài 91 cm – hệ thống sonar có thể sử dụng được thả, phóng ra từ máy bay hoặc tàu tác chiến chống ngầm hoặc tàu nghiên cứu âm thanh dưới nước.
Nguyên lý hoạt động
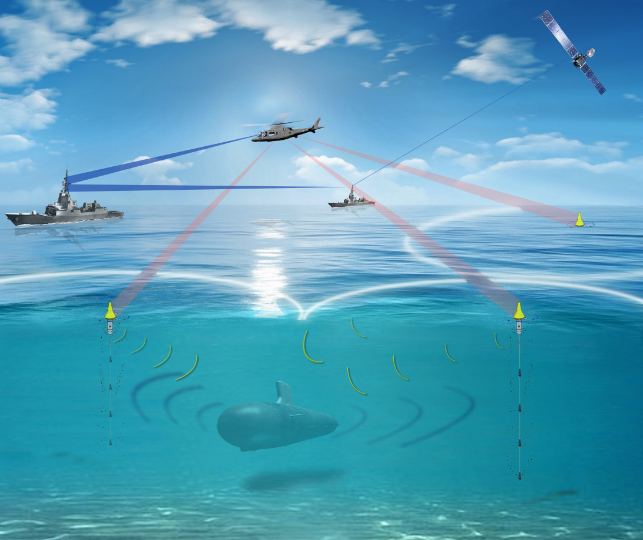
Phao thủy âm vô tuyến (sonobuoy), là từ ghép của sonar (thiết bị thủy âm) và buoy (cái phao), được phóng ra khỏi máy bay trong các hộp và triển khai khi va chạm với nước. Một phao nổi bơm hơi có gắn máy phát vô tuyến vẫn ở trên bề mặt để liên lạc với máy bay, trong khi một hoặc nhiều cảm biến thủy điện và thiết bị ổn định hạ xuống dưới bề mặt đến độ sâu đã chọn có thể thay đổi, tùy thuộc vào điều kiện môi trường và kiểu tìm kiếm. Phao chuyển tiếp thông tin âm thanh từ (các) thiết bị thủy điện của nó qua sóng UHF / VHF tới người điều khiển trên máy bay.
Lịch sử
Với sự cải tiến công nghệ của tàu ngầm trong chiến tranh hiện đại, nhu cầu về một hệ thống theo dõi hiệu quả đã ra đời. Định vị và định vị bằng âm thanh (SONAR) ban đầu được phát triển bởi người Anh – được gọi nó là ASDIC – trong những ngày tàn của Thế chiến I. Vào thời điểm đó, cách duy nhất để phát hiện tàu ngầm là lắng nghe chúng (sóng âm thụ động) hoặc tình cờ nhìn thấy chúng khi chúng đang nạp ắc-quy trên mặt nước. Tuần tra trên không (người Anh chủ yếu sử dụng khí cầu nhỏ có lợi thế về khả năng hoạt động lâu dài) có thể phát hiện tàu ngầm đang nổi và đôi khi, trong điều kiện nhất định – thậm chí cả khi tàu ngầm đang lặn vì độ sâu lặn của tàu ngầm thời đó rất hạn chế. Nếu liên lạc được, chúng sẽ bám theo tàu ngầm đồng thời kêu gọi các tàu mặt nước bằng sóng vô tuyến để tấn công nó.
Sonar được sử dụng rất hạn chế và chủ yếu được thử nghiệm ở Đại Tây Dương với rất ít sĩ quan hải quân nhận thấy hệ thống này có tác dụng gì. Khi thế chiến kết thúc, sự phát triển nghiêm túc của sóng siêu âm ở Hoa Kỳ đã kết thúc, một thực tế có thể gây tử vong trong những ngày đầu của Thế chiến II. Tuy nhiên, sự phát triển đáng kể của ASDIC đã diễn ra ở Vương quốc Anh, bao gồm cả việc tích hợp với bảng vẽ và vũ khí.
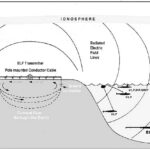
Trong khi Vương quốc Anh theo đuổi việc phát triển sonar trong thời kỳ giữa hai cuộc chiến, Cơ quan Khảo sát Trắc địa và Bờ biển Hoa Kỳ trong những năm 1920 đã phát triển phương pháp đo phạm vi âm thanh vô tuyến để xác định vị trí của tàu khảo sát trong các hoạt động khảo sát thủy văn bằng cách cho nổ một quả nổ nhỏ tại vị trí của tàu khảo sát, ghi lại thời gian để âm thanh của vụ nổ truyền tới các ống nghe dưới nước ở xa gắn ở các trạm trên bờ hoặc trên các tàu trạm của thủy thủ đoàn, đồng thời thông báo thời gian nhận được âm thanh cho tàu, cho phép thủy thủ đoàn xác định vị trí chính xác bằng cách sử dụng tam giác. Năm 1931, Cơ quan Khảo sát Bờ biển và Trắc địa đề xuất thay thế các tàu trạm có thủy thủ đoàn bằng “phao vô tuyến-âm thanh” (radio-sonobuoys) và đưa các phao mới vào sử dụng bắt đầu từ tháng 7/1936. Những chiếc phao này nặng 320 kg, có thể được triển khai hoặc thu hồi bằng cách – các tàu khảo sát bờ biển và trắc địa sẽ đi trong vòng 5 phút và được trang bị ống nghe dưới nước, pin và máy phát vô tuyến tự động gửi tín hiệu vô tuyến khi điện thoại dưới nước của họ phát hiện ra âm thanh của một vụ nổ khác nhau. Những “phao vô tuyến-âm thanh” này là tổ tiên của các Phao thủy âm vô tuyến bắt đầu xuất hiện vào những năm 1940.
Thiệt hại do tàu U-boat của Đức gây ra cho quân Đồng minh trong Thế chiến II khiến nhu cầu về sóng siêu âm trở thành ưu tiên hàng đầu. Với hàng triệu tấn tàu bị chìm ở Đại Tây Dương, nhu cầu xác định vị trí các tàu ngầm để có thể đánh chìm hoặc ngăn chặn chúng tấn công là rất cần thiết. Sonar được lắp đặt trên một số tàu cùng với radar và định hướng tần số cao (“Huff-Duff”) để phát hiện tàu ngầm đang nổi. Mặc dù sonar là một hệ thống nguyên thủy nhưng nó đã không ngừng được cải tiến.
Các phương pháp tác chiến chống ngầm hiện đại phát triển từ các kỹ thuật được phát triển cho việc di chuyển của các đoàn tàu vận tải và các nhóm chiến đấu qua các vùng biển thù địch trong Thế chiến II. Điều bắt buộc là các tàu ngầm phải bị phát hiện và vô hiệu hóa từ lâu trước khi nhóm đặc nhiệm đến trong phạm vi tấn công. Việc phát hiện tàu ngầm dựa trên máy bay là giải pháp hiển nhiên. Sự trưởng thành của công nghệ liên lạc vô tuyến và sóng siêu âm đã giúp người ta có thể kết hợp bộ chuyển đổi siêu âm, pin, máy phát vô tuyến và ăng-ten cần trong một phao nổi (sono) triển khai trên không khép kín.
Phao thủy âm vô tuyến thời kỳ đầu có phạm vi hoạt động và thời lượng pin hạn chế, bị lấn át bởi tiếng ồn của đại dương. Chúng xuất hiện lần đầu tiên trong Thế chiến II, khi chúng được Bộ Tư lệnh Duyên hải RAF sử dụng vào tháng 7/1942 với mật danh “High Tea”, phi đội đầu tiên sử dụng chúng trong hoạt động là Phi đội số 210 RAF, điều hành Sunderlands. Chúng cũng bị hạn chế bởi việc sử dụng tai người để phân biệt tiếng ồn do con người tạo ra từ nền đại dương. Tuy nhiên, họ đã chứng minh rằng công nghệ này là khả thi. Với sự phát triển của điện thoại dưới nước tốt hơn, bóng bán dẫn và sự thu nhỏ, cũng như việc nhận ra rằng âm thanh tần số rất thấp là quan trọng, sau đó là các cảm biến âm thanh hiệu quả hơn. Phao thủy âm vô tuyến đã phát triển từ một cảm biến cao 1,8 m, đường kính 0,61 m bự chảng thành bộ thiết bị điện tử nhỏ gọn như ngày nay.
Sự tiến bộ trong công nghệ Phao thủy âm vô tuyến đã hỗ trợ sự phát triển của các loại máy bay như P-2 Neptune, S-2 Tracker, S-3B Viking và P-3 Orion để tác chiến chống ngầm.
Hoạt động
Phao sonobuoy được phân thành ba loại: chủ động, thụ động và mục đích đặc biệt.
– Phao thủy âm vô tuyến chủ động phát ra năng lượng âm thanh (ping) vào trong nước và lắng nghe tiếng vọng trở lại trước khi truyền thông tin – thường là phạm vi và phương hướng – qua sóng vô tuyến UHF/VHF tới tàu hoặc máy bay tiếp nhận. Các Phao thủy âm vô tuyến hoạt động ban đầu phát ra âm thanh liên tục sau khi triển khai trong một khoảng thời gian định trước. Sau đó, các phao thủy âm vô tuyến của Hệ thống sonobuoy được kích hoạt theo lệnh (CASS) cho phép máy bay kích hoạt các tiếng ping (hoặc đánh chìm phao) thông qua liên kết vô tuyến. Điều này đã phát triển thành DICASS (Directional CASS) trong đó tiếng vang phản hồi chứa phương vị cũng như dữ liệu về cự li.
– Phao thủy âm vô tuyến thụ động không phát ra âm thanh nào xuống nước mà chỉ lắng nghe, chờ đợi sóng âm thanh (ví dụ như tiếng động của nhà máy điện, cánh quạt hoặc tiếng đóng cửa và các tiếng động khác) từ tàu mặt nước hoặc tàu ngầm hoặc các tín hiệu âm thanh quan tâm khác như hộp đen pinger của máy bay bị rơi, để tiếp cận hydrophone. Âm thanh sau đó được truyền qua sóng vô tuyến UHF/VHF tới tàu hoặc máy bay nhận.
– Phao thủy âm vô tuyến có mục đích đặc biệt chuyển tiếp nhiều loại dữ liệu hải dương học tới tàu, máy bay hoặc vệ tinh. Hiện nay có ba loại phao thủy âm vô tuyến chuyên dụng được sử dụng. Những phao thủy âm vô tuyến này không được thiết kế để sử dụng trong việc phát hiện hoặc định vị tàu ngầm.
+ BT – Phao tắm nhiệt BT (bathythermobuoy) chuyển tiếp các số liệu đo nhiệt độ nước và/hoặc độ mặn ở các độ sâu khác nhau. Việc đặt một mẫu phao thủy âm vô tuyến thường được thực hiện trước bằng cách đặt một hoặc nhiều phao nhiệt để phát hiện các tầng mật độ/nhiệt độ. Các tầng như vậy có thể đóng vai trò là vật phản xạ sonar hoặc ngược lại, là ống dẫn sóng.
+ SAR – Phao tìm kiếm và cứu nạn SAR (search and rescue) được thiết kế để hoạt động như đèn hiệu tần số vô tuyến nổi. Do đó, nó được sử dụng để hỗ trợ đánh dấu vị trí của hiện trường vụ tai nạn máy bay, con tàu bị chìm hoặc những người sống sót trên biển.
+ ATAC/DLC – Phao liên lạc có thể vận chuyển trên không ATAC (Air transportable communication) và phao liên lạc liên kết xuống DLC (down-link communication), chẳng hạn như UQC, hay “gertrude”, được thiết kế để sử dụng làm phương tiện liên lạc giữa máy bay và tàu ngầm hoặc giữa một tàu mặt nước nào đó và một tàu ngầm.
Thông tin này được phân tích bởi máy tính, người điều khiển âm thanh và điều phối viên chiến thuật để giải thích thông tin Phao thủy âm vô tuyến.
Các phao thủy âm vô tuyến chủ động và/hoặc thụ động có thể được đặt ở các khu vực rộng lớn hoặc các rào cản để phát hiện ban đầu. Phao hoạt động sau đó có thể được sử dụng để xác định vị trí chính xác. Phao thụ động cũng có thể được triển khai trên bề mặt theo mô hình để cho phép xác định vị trí tương đối chính xác bằng phép đo tam giác. Nhiều máy bay hoặc tàu theo dõi mô hình hoặc lắng nghe thụ động hoặc truyền chủ động để đưa tàu ngầm vào lưới sonar. Đôi khi, mẫu này có dạng lưới hoặc dạng mảng khác và quá trình xử lý tín hiệu dạng chùm phức tạp được sử dụng để vượt qua khả năng của một số hoặc số lượng hạn chế của điện thoại dưới nước./.