
Tàu ngầm (“submarine” hoặc “sub”) là phương tiện thủy có khả năng hoạt động độc lập dưới nước. Nó khác với tàu lặn (submersible) – có khả năng dưới nước hạn chế hơn. Thuật ngữ này đôi khi cũng được sử dụng trong lịch sử hoặc thông tục để chỉ các phương tiện và rô-bốt điều khiển từ xa, cũng như các tàu cỡ trung bình hoặc nhỏ hơn, chẳng hạn như “midget submarine” (tàu ngầm mini) và “wet sub” (tàu ngầm ướt – tàu ngầm mà người vận hành tiếp xúc trực tiếp với môi trường nước). Trong tiếng Anh và truyền thống Hải quân phương Tây, tàu ngầm được gọi là boats (thuyền) chứ không phải ships (tàu) bất kể kích thước của chúng.

Mặc dù các tàu ngầm thử nghiệm đã được chế tạo trước đó, nhưng thiết kế tàu ngầm chỉ bắt đầu trong thế kỷ XIX và chúng đã được một số lực lượng hải quân sử dụng. Chúng lần đầu tiên được sử dụng rộng rãi là trong Thế chiến I (1914-1918), và hiện được sử dụng trong nhiều lực lượng hải quân lớn nhỏ. Dùng trong quân sự bao gồm: tấn công các tàu mặt nước của đối phương (tàu buôn và tàu chiến) hoặc các tàu ngầm khác; bảo vệ tàu sân bay; phong tỏa; răn đe hạt nhân; trinh sát; tấn công mặt đất thông thường (ví dụ: sử dụng tên lửa hành trình) và bí mật đổ bộ lực lượng đặc nhiệm. Sử dụng dân sự bao gồm khoa học biển, cứu hộ, thăm dò, kiểm tra và bảo trì cơ sở. Tàu ngầm cũng có thể được thiết kế cho các chức năng chuyên dụng như nhiệm vụ tìm kiếm cứu nạn và sửa chữa cáp dưới biển. Chúng cũng được sử dụng trong du lịch và khảo cổ học dưới đáy biển. Tàu ngầm lặn sâu hiện đại có nguồn gốc kết cấu từ một loại tàu ngầm lặn sâu tự hành – bathyscaphe, phát triển từ chuông lặn (diving bell).
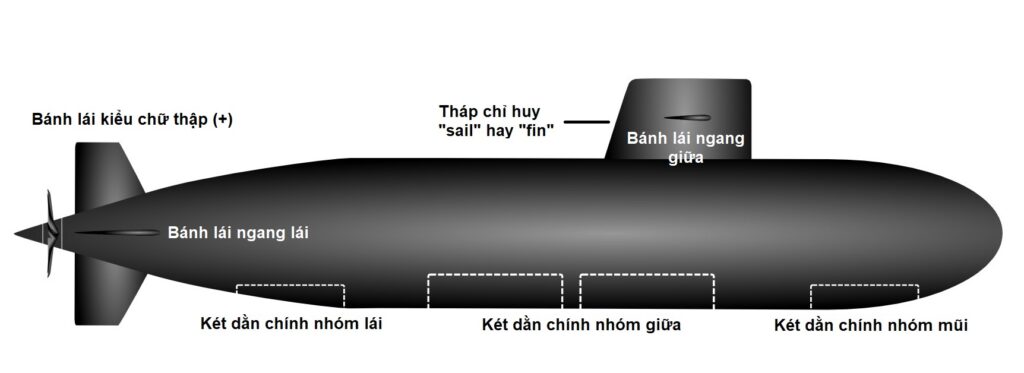
Hầu hết các tàu ngầm lớn đều có kết cấu bao gồm một thân hình trụ với hai đầu mút mũi-lái hình bán cầu (hoặc hình nón) và một cấu trúc thẳng đứng, thường nằm ở giữa tàu, chứa các thiết bị liên lạc và cảm biến cũng như kính tiềm vọng (gọi chung là các thiết bị nâng hạ). Trong các tàu ngầm hiện đại, cấu trúc này được gọi là “sail” (buồng lái) theo cách sử dụng của người Mỹ và “fin” (vây) theo cách sử dụng của người châu Âu. “Conning tower” (tháp chỉ huy) là một đặc điểm của thiết kế trước đó: một thân tàu chịu áp riêng biệt phía trên thân chính của con tàu – cho phép sử dụng các kính tiềm vọng ngắn hơn. Tàu ngầm thường có một chân vịt (hoặc máy bơm phản lực) ở phía sau và nhiều bánh lái điều khiển thủy động lực học khác nhau. Các tàu ngầm chuyên dụng, lặn sâu và nhỏ hơn có thể khác biệt đáng kể so với thiết kế truyền thống này. Tàu ngầm lặn xuống, nổi lên nhờ bánh lái lặn-nổi (bánh lái ngang hoặc kết hợp giữa các bánh lái chữ X) và thay đổi lượng nước hay không khí trong các két dằn để điều chỉnh độ nổi của chúng.
Tàu ngầm gồm nhiều loại và khả năng khác nhau: thiết bị tự hành loại nhỏ; tàu ngầm một hoặc hai người hoạt động trong vài giờ; các tàu có thể lặn trong nước suốt 6 tháng – chẳng hạn như lớp Typhoon của Nga – tàu ngầm lớn nhất từng được chế tạo. Độ sâu hoạt động của tàu ngầm lớn hơn mức có thể sống sót đối với thợ lặn là con người.
Lịch sử
Nguồn gốc từ nguyên
Từ submarine chỉ đơn giản có nghĩa là “dưới nước” hoặc “dưới biển”. “sub” là phía dưới, “marine” là thuộc về biển, về hàng hải. Mặc dù “submarine” là một danh từ, nó thường dùng để chỉ một con tàu có thể di chuyển dưới nước. Thuật ngữ này là sự thu gọn của “submarine boat” và tương tự trong một số ngôn ngữ, ví dụ như tiếng Pháp (sous-marin) và tiếng Tây Ban Nha (submarino), mặc dù những ngôn ngữ khác giữ lại thuật ngữ gốc, chẳng hạn như tiếng Hà Lan (Onderzeeboot), tiếng Đức (Unterseeboot), tiếng Thụy Điển (Undervattensbåt) và tiếng Nga (подводная лодка), tất cả đều có nghĩa là “submarine boat” – thuyền dưới biển.
Mặc dù được gọi một cách không chính thức là boats, tàu ngầm Hoa Kỳ sử dụng ký hiệu USS (United States Ship) ở đầu tên của chúng, chẳng hạn như USS Alabama. Trong Hải quân Hoàng gia, tên gọi HMS (His Majesty’s Submarine hoặc His Majesty’s Ship) có nghĩa là hoặc “Tàu ngầm của Hoàng thượng” hoặc “Tàu của Hoàng thượng”, mặc dù sau này đôi khi được gọi là “HMS/m”.
Theo thói quen, người Việt không gọi là “thuyền ngầm” mà là “tàu ngầm”, nhưng lại gọi “thuyền trưởng” chứ không phải “tàu trưởng”.
Tàu lặn ban đầu bằng sức người
Thế kỷ XVI và XVII
Theo một báo cáo trong Opusculum Taisnieri xuất bản năm 1562: “Hai người Hy Lạp đã lặn xuống và nổi lên trên sông Tagus gần Thành phố Toledo nhiều lần trước sự chứng kiến của Hoàng đế La Mã Thần thánh Charles V, mà không bị ướt và ngọn lửa họ mang trên tay vẫn cháy”.
Năm 1578, nhà toán học người Anh William Bourne đã ghi lại trong cuốn sách của mình “Inventions or Devises” (Những phát minh hoặc sáng chế) một trong những kế hoạch đầu tiên cho một phương tiện định vị dưới nước. Vài năm sau, nhà toán học và thần học người Scotland John Napier đã viết trong tác phẩm “Secret Inventions” (Những phát minh bí mật) (1596) của mình rằng “Những phát minh này bên cạnh việc nghĩ ra cách lặn dưới nước bằng thiết bị lặn, những sáng kiến và chiến lược khác để làm hại kẻ thù nhờ Ân điển của Chúa và công việc của chuyên gia. Những người thợ thủ công mà tôi hy vọng sẽ thực hiện được”. Không rõ liệu ông ta có bao giờ thực hiện ý tưởng của mình hay không.
Jerónimo de Ayanz y Beaumont (1553-1613) đã tạo ra các thiết kế chi tiết cho hai loại phương tiện lặn tái tạo được khí thở. Chúng được trang bị mái chèo, ống thở nổi tự động hoạt động bằng máy bơm bên trong, cửa sổ và găng tay dùng để thủy thủ đoàn điều khiển các vật thể dưới nước. Ayanaz đã lên kế hoạch sử dụng chúng cho chiến đấu, sử dụng chúng để tiếp cận tàu địch mà không bị phát hiện và cài đặt thuốc nổ hẹn giờ trên thân tàu của chúng.
Chiếc tàu lặn đầu tiên có cấu tạo có thông tin đáng tin cậy được thiết kế và chế tạo vào năm 1620 bởi Cornelis Drebbel, một người Hà Lan phục vụ cho James I của Anh. Nó được đẩy bằng mái chèo.
Thế kỷ XVIII
Vào giữa Thế kỷ XVIII, hơn một chục bằng sáng chế cho tàu ngầm, thiết bị lặn đã được cấp ở Anh. Năm 1747, Nathaniel Symons đã được cấp bằng sáng chế và chế tạo mô phỏng hoạt động đầu tiên được biết đến về việc sử dụng két dằn để lặn xuống. Thiết kế của nó sử dụng những chiếc túi da có thể chứa đầy nước để lặn thủ công. Một cơ chế đã được sử dụng để vặn nước ra khỏi túi và làm cho thuyền nổi lên. Năm 1749, Tạp chí Quý ông (Gentlemen’s Magazine) báo cáo rằng một thiết kế tương tự ban đầu được đề xuất bởi Giovanni Borelli vào năm 1680. Cải tiến thiết kế hơn nữa đã bị đình trệ trong hơn một thế kỷ, cho đến khi áp dụng các công nghệ mới cho động cơ đẩy và hệ thống cân bằng.
Tàu lặn quân sự đầu tiên là Turtle (1775), một thiết bị hình quả trứng cá chạy bằng tay do David Bushnell người Mỹ thiết kế để chứa một người. Đây là chiếc tàu ngầm đầu tiên được xác minh có khả năng hoạt động và di chuyển độc lập dưới nước, đồng thời là chiếc đầu tiên sử dụng chân vịt để đẩy.
Thế kỉ XIX
Năm 1800, Pháp chế tạo Nautilus, một tàu ngầm chạy bằng sức người do Robert Fulton người Mỹ thiết kế. Cuộc thử nghiệm đã bị từ bỏ vào năm 1804, cũng như người Anh, khi họ xem xét lại thiết kế tàu ngầm của Fulton.
Năm 1850, Brandtaucher của Wilhelm Bauer được chế tạo ở Đức. Nó vẫn là chiếc tàu ngầm lâu đời nhất còn tồn tại được biết đến trên thế giới.
Năm 1864, vào cuối Nội chiến Hoa Kỳ, H.L. Hunley của hải quân Liên minh miền Nam đã trở thành tàu ngầm quân sự đầu tiên đánh chìm một tàu địch, tàu chiến USS Housatonic của Quân miền Bắc, bằng cách sử dụng một thùng chứa đầy thuốc nổ trên một xà ngang như một quả ngư lôi. Tàu Hunley cũng bị chìm do sóng xung kích của vụ nổ giết chết thủy thủ đoàn của nó ngay lập tức, do họ không thể kịp lặn xuống hoặc chạy ra xa.
Năm 1866, Sub Marine Explorer là tàu ngầm đầu tiên lặn thành công, hành trình dưới nước và nổi lên dưới sự điều khiển của thủy thủ đoàn. Thiết kế của Julius H. Kroehl, người Mỹ gốc Đức (trong tiếng Đức là Kröhl) kết hợp các yếu tố vẫn được sử dụng trong các tàu ngầm hiện đại.
Năm 1866, Flach được xây dựng theo yêu cầu của chính phủ Chile bởi Karl Flach, một kỹ sư và người nhập cư người Đức. Đây là chiếc tàu ngầm thứ năm được đóng trên thế giới, cùng với chiếc thứ hai, được thiết kế để bảo vệ cảng Valparaiso trước sự tấn công của Hải quân Tây Ban Nha trong Chiến tranh quần đảo Chincha.
Tàu ngầm chạy bằng máy
Các tàu ngầm không thể được hải quân đưa vào sử dụng rộng rãi hoặc thường xuyên cho đến khi các động cơ phù hợp được phát triển. Thời đại từ năm 1863 đến năm 1904 đánh dấu thời điểm quan trọng trong quá trình phát triển tàu ngầm và một số công nghệ quan trọng đã xuất hiện. Một số quốc gia đã chế tạo và sử dụng tàu ngầm. Động cơ đẩy điện diesel trở thành hệ thống năng lượng chiếm ưu thế và các thiết bị như kính tiềm vọng đã được tiêu chuẩn hóa. Các quốc gia đã tiến hành nhiều thử nghiệm về chiến thuật và vũ khí hiệu quả cho tàu ngầm, dẫn đến tác động lớn của chúng trong Thế chiến I.
1863-1904
Tàu ngầm đầu tiên không dựa vào sức người để đẩy là Plongeur (Thợ lặn) của Pháp, hạ thủy năm 1863, sử dụng khí nén ở 180 psi (1.200 kPa). Narcís Monturiol đã thiết kế chiếc tàu ngầm chạy bằng khí đốt và không phụ thuộc vào không khí đầu tiên, Ictíneo II, được hạ thủy tại Barcelona, Tây Ban Nha vào năm 1864.
Tàu ngầm đã trở thành một vũ khí khả thi với sự phát triển của ngư lôi Whitehead, được thiết kế vào năm 1866 bởi kỹ sư người Anh Robert Whitehead, ngư lôi tự hành hoặc “di động” (locomotive) thực tế đầu tiên. Ngư lôi spar đã được Hải quân các Quốc gia Liên bang phát triển trước đó được coi là không thể thực hiện được, vì nó được cho là đã đánh chìm cả mục tiêu dự định và có thể là HL Hunley, tàu ngầm đã triển khai nó.
Nhà phát minh người Ireland John Philip Holland đã chế tạo một chiếc tàu ngầm mẫu vào năm 1876 và năm 1878 đã trình diễn nguyên mẫu Holland I. Điều này được theo sau bởi một số thiết kế không thành công. Năm 1896, ông thiết kế tàu ngầm Holland Type VI, sử dụng năng lượng động cơ đốt trong trên mặt nước và năng lượng pin điện dưới nước. Được hạ thủy vào ngày 17/5/1897 tại Nhà máy đóng tàu Crescent của Hải quân Lt. Lewis Nixon ở Elizabeth, New Jersey, Holland VI được Hải quân Hoa Kỳ mua vào ngày 11/4/1900, trở thành chiếc tàu ngầm được đưa vào hoạt động đầu tiên của Hải quân, được đặt tên là USS Holland.
Các cuộc thảo luận giữa giáo sĩ người Anh với nhà phát minh George Garrett và nhà công nghiệp Thụy Điển Thorsten Nordenfelt đã dẫn đến những chiếc tàu ngầm chạy bằng hơi nước thực tế đầu tiên, được trang bị ngư lôi và sẵn sàng sử dụng trong quân đội. Chiếc đầu tiên là Nordenfelt I, một con tàu nặng 56 tấn, dài 19,5 m tương tự như chiếc Resurgam xấu số của Garrett (1879), với tầm hoạt động 240 km (130 hl), được trang bị một quả ngư lôi duy nhất vào năm 1885.
Phương tiện đẩy đáng tin cậy cho tàu lặn chỉ có thể thực hiện được vào những năm 1880 với sự ra đời của công nghệ pin điện cần thiết. Những chiếc thuyền chạy bằng điện đầu tiên được chế tạo bởi Isaac Peral y Caballero ở Tây Ban Nha (người đã chế tạo Peral), Dupuy de Lôme (người đã chế tạo Gymnote) và Gustave Zédé (người đã chế tạo Sirène) ở Pháp, và James Franklin Waddington (người đã chế tạo Porpoise) ở Anh. Thiết kế của Peral có ngư lôi và các hệ thống khác mà sau này trở thành tiêu chuẩn cho tàu ngầm.
Được đưa vào hoạt động vào tháng 6/1900, chiếc Narval chạy bằng hơi nước và điện của Pháp sử dụng thiết kế thân tàu kép điển hình hiện nay, với thân tàu chịu áp bên trong lớp vỏ ngoài. Những con tàu nặng 200 tấn này có tầm hoạt động hơn 160 km dưới nước. Tàu ngầm Aigrette của Pháp vào năm 1904 đã cải tiến hơn nữa khái niệm này bằng cách sử dụng động cơ diesel thay vì động cơ xăng cho năng lượng mặt nước. Một số lượng lớn các tàu ngầm này đã được chế tạo, với 76 chiếc hoàn thành trước năm 1914.
Hải quân Hoàng gia Anh đã đưa vào hoạt động năm chiếc tàu ngầm lớp Holland từ Vickers, Barrow-in-Furness, theo giấy phép của Holland Torpedo Boat Company từ năm 1901 đến năm 1903. Việc chế tạo những chiếc thuyền này mất nhiều thời gian hơn dự kiến, với chiếc đầu tiên chỉ sẵn sàng cho một cuộc lặn thử nghiệm trên biển vào ngày 6/4/1902. Mặc dù thiết kế đã được mua hoàn toàn từ công ty Hoa Kỳ, nhưng thiết kế thực tế được sử dụng là một cải tiến chưa được thử nghiệm đối với thiết kế ban đầu của Hà Lan sử dụng động cơ xăng 180 mã lực (130 kW) mới.
Những loại tàu ngầm này lần đầu tiên được sử dụng trong Chiến tranh Nga-Nhật 1904-1905. Do sự phong tỏa tại Cảng Arthur, người Nga đã gửi tàu ngầm của họ đến Vladivostok, nơi mà đến ngày 1/1/1905 đã có 7 chiếc thuyền, đủ để tạo nên “hạm đội tàu ngầm hoạt động” đầu tiên trên thế giới. Hạm đội tàu ngầm mới bắt đầu tuần tra vào ngày 14/2, mỗi cuộc tuần tra thường kéo dài khoảng 24 giờ. Cuộc đối đầu đầu tiên với các tàu chiến Nhật Bản xảy ra vào ngày 29/4/1905 khi tàu ngầm Som của Nga bị các tàu phóng lôi của Nhật Bản bắn trúng, nhưng sau đó rút lui.
Thế chiến I
Tàu ngầm quân sự lần đầu tiên tạo ra tác động đáng kể trong Thế chiến I. Các lực lượng như U-boat của Đức đã tham chiến trong Trận chiến đầu tiên ở Đại Tây Dương và chịu trách nhiệm đánh chìm RMS Lusitania, chiếc tàu này đã bị đánh chìm do tác chiến tàu ngầm không hạn chế và thường được viện dẫn là một trong những lý do dẫn đến sự tham chiến của Hoa Kỳ.
Khi chiến tranh bùng nổ, Đức chỉ có 20 tàu ngầm sẵn sàng chiến đấu ngay lập tức, mặc dù những tàu này bao gồm các tàu thuộc lớp U-19 động cơ diesel, có tầm hoạt động đủ 8.000 km và tốc độ 8 hl/g (15 km/h) để cho phép chúng hoạt động hiệu quả xung quanh toàn bộ bờ biển Anh. Ngược lại, Hải quân Hoàng gia Anh có tổng cộng 74 tàu ngầm, mặc dù hiệu quả khác nhau. Vào tháng 8/1914, một đội gồm 10 chiếc U-boat khởi hành từ căn cứ của họ ở Heligoland để tấn công các tàu chiến của Hải quân Hoàng gia Anh ở Biển Bắc trong cuộc tuần tra chiến tranh tàu ngầm đầu tiên trong lịch sử.
Khả năng hoạt động như những cỗ máy chiến tranh thực tế của U-boat dựa vào các chiến thuật mới, số lượng của chúng và các công nghệ tàu ngầm như hệ thống năng lượng diesel-điện kết hợp được phát triển trong những năm trước. Khả năng lặn tốt hơn là tàu ngầm thực sự, U-boat hoạt động chủ yếu trên mặt nước bằng động cơ thông thường, thỉnh thoảng lặn xuống để tấn công bằng năng lượng pin. Chúng có mặt cắt ngang gần giống hình tam giác, với một sống tàu riêng biệt để điều khiển lăn khi nổi lên và một hình cung rõ ràng. Trong Thế chiến I, hơn 5.000 tàu Đồng minh đã bị U-boat đánh chìm.
Người Anh đã đáp lại sự phát triển của Đức trong công nghệ tàu ngầm bằng việc tạo ra các tàu ngầm lớp K. Tuy nhiên, những chiếc tàu ngầm này nổi tiếng là nguy hiểm khi hoạt động do nhiều lỗi thiết kế và khả năng cơ động kém.
Thế chiến II
Trong Thế chiến II, Đức đã sử dụng tàu ngầm để gây ra hậu quả tàn khốc trong Trận chiến Đại Tây Dương, nơi nước này cố gắng cắt đứt các tuyến đường tiếp tế của Anh bằng cách đánh chìm nhiều tàu buôn hơn số tàu mà Anh có thể thay thế. Những tàu buôn này rất quan trọng để cung cấp thực phẩm cho người dân Anh, nguyên liệu thô cho ngành công nghiệp, cung cấp nhiên liệu và vũ khí cho các lực lượng vũ trang. Mặc dù những chiếc U-boat đã được cập nhật trong những năm giữa hai cuộc chiến, nhưng sự đổi mới chính là cải thiện thông tin liên lạc, được mã hóa bằng máy mật mã Enigma. Điều này cho phép các chiến thuật hải quân tấn công bầy đàn (Rudeltaktik, thường được gọi là “bầy sói”), nhưng cuối cùng cũng là sự sụp đổ của U-boat. Vào cuối cuộc chiến, gần 3.000 tàu Đồng minh (175 tàu chiến, 2.825 tàu buôn) đã bị U-boat đánh chìm. Mặc dù thành công trong giai đoạn đầu của cuộc chiến, nhưng hạm đội U-boat của Đức đã chịu tổn thất nặng nề, mất 793 chiếc U-boat và khoảng 28.000 thủy thủ trong tổng số 41.000 người, tỷ lệ thương vong khoảng 70%.
Hải quân Đế quốc Nhật Bản vận hành hạm đội tàu ngầm đa dạng nhất so với bất kỳ lực lượng hải quân nào, bao gồm ngư lôi có người lái Kaiten, tàu ngầm hạng trung (Ko-hyoteki và lớp Kairyu Type A), tàu ngầm hạng trung, tàu ngầm tiếp tế được chế tạo có mục đích và tàu ngầm hạm đội tầm xa. Họ cũng sở hữu những tàu ngầm có tốc độ lặn cao nhất trong Thế chiến II (tàu ngầm lớp I-201) và những chiếc tàu ngầm có thể chở nhiều máy bay (tàu ngầm lớp I-400). Chúng cũng được trang bị một trong những ngư lôi tiên tiến nhất trong cuộc xung đột, Type 95 chạy bằng oxy. Tuy nhiên, bất chấp năng lực kỹ thuật của họ, Nhật Bản đã chọn sử dụng tàu ngầm của mình cho chiến tranh hạm đội, và do đó tương đối không thành công, vì tàu chiến nhanh, cơ động và được bảo vệ tốt so với tàu buôn.
Lực lượng tàu ngầm là vũ khí chống hạm hiệu quả nhất trong kho vũ khí của Mỹ. Tàu ngầm, mặc dù chỉ chiếm khoảng 2% Hải quân Hoa Kỳ, nhưng đã tiêu diệt hơn 30% Hải quân Nhật Bản, bao gồm 8 tàu sân bay, 1 thiết giáp hạm và 11 tàu tuần dương. Các tàu ngầm của Hoa Kỳ cũng đã tiêu diệt hơn 60% hạm đội thương mại của Nhật Bản, làm tê liệt khả năng tiếp tế cho các lực lượng quân sự và nỗ lực chiến tranh công nghiệp của Nhật Bản. Các tàu ngầm của quân Đồng minh trong Chiến tranh Thái Bình Dương đã phá hủy nhiều tàu thuyền của Nhật Bản hơn tất cả các loại vũ khí khác cộng lại. Chiến công này được hỗ trợ đáng kể bởi việc Hải quân Đế quốc Nhật Bản không cung cấp đủ lực lượng hộ tống cho hạm đội tàu buôn của quốc gia.
Trong Thế chiến II, có 314 tàu ngầm phục vụ trong Hải quân Mỹ, trong đó khoảng 260 chiếc được triển khai tới Thái Bình Dương. Khi quân Nhật tấn công Hawaii vào tháng 12/1941, 111 chiếc đã được đưa vào hoạt động; 203 tàu ngầm lớp Gato, Balao, và Tench đã được đưa vào hoạt động trong chiến tranh. Trong chiến tranh, 52 tàu ngầm của Hoa Kỳ đã bị mất do mọi nguyên nhân, trong đó có 48 chiếc trực tiếp do chiến sự. Tàu ngầm Mỹ đã đánh chìm 1.560 tàu địch, tổng trọng tải 5,3 triệu tấn (55% tổng số bị đánh chìm).
Lực lượng tàu ngầm của Hải quân Hoàng gia Anh được sử dụng chủ yếu trong cuộc phong tỏa cổ điển của phe Trục. Các khu vực hoạt động chính của nó là xung quanh Na Uy, ở Địa Trung Hải (đối diện với các tuyến đường cung cấp của phe Trục đến Bắc Phi) và ở Viễn Đông. Trong cuộc chiến đó, các tàu ngầm của Anh đã đánh chìm 2 triệu tấn tàu địch và 57 tàu chiến lớn, trong đó có 35 tàu ngầm. Trong số này là trường hợp duy nhất được ghi nhận về một tàu ngầm đánh chìm một tàu ngầm khác trong khi cả hai đều lặn dưới nước. Điều này xảy ra khi HMS Venturer giao chiến với U-864; mạo hiểm thủy thủ đoàn đã tính toán thủ công giải pháp bắn thành công nhằm vào mục tiêu cơ động ba chiều bằng cách sử dụng các kỹ thuật đã trở thành cơ sở của hệ thống nhắm mục tiêu máy tính ngư lôi hiện đại. 74 tàu ngầm của Anh đã bị mất, phần lớn, 42 chiếc, ở Địa Trung Hải.
Mô hình quân sự thời Chiến tranh Lạnh
Vụ phóng tên lửa hành trình đầu tiên (SSM-N-8 Regulus) từ tàu ngầm diễn ra vào tháng 7/1953, từ boong tàu USS Tunny, một tàu chiến trong Thế chiến II được sửa đổi để mang tên lửa có đầu đạn hạt nhân. Tunny và tàu chị em của nó, Barbero, là những tàu ngầm tuần tra răn đe hạt nhân đầu tiên của Hoa Kỳ. Vào những năm 1950, năng lượng hạt nhân đã thay thế một phần động cơ diesel-điện. Thiết bị cũng được phát triển để chiết xuất oxy từ nước biển. Hai cải tiến này đã mang lại cho tàu ngầm khả năng lặn dưới nước trong nhiều tuần hoặc nhiều tháng. Hầu hết các tàu ngầm hải quân được đóng từ thời điểm đó là của Mỹ, Liên Xô/Liên bang Nga, Anh và Pháp đã được cung cấp năng lượng bởi các lò phản ứng hạt nhân.
Năm 1959-1960, những chiếc tàu ngầm tên lửa đạn đạo đầu tiên được cả Hoa Kỳ (lớp George Washington) và Liên Xô (lớp Golf) đưa vào trang bị như một phần của chiến lược răn đe hạt nhân trong Chiến tranh Lạnh.
Trong Chiến tranh Lạnh, Mỹ và Liên Xô duy trì các hạm đội tàu ngầm lớn tham gia vào trò chơi mèo vờn chuột. Liên Xô đã mất ít nhất 4 tàu ngầm trong giai đoạn này: K-129 bị mất năm 1968 (một phần được CIA trục vớt từ đáy đại dương bằng tàu Glomar Explorer do Howard Hughes thiết kế), K-8 năm 1970, K- 219 năm 1986, và Komsomolets năm 1989 (giữ kỷ lục độ sâu trong số các tàu ngầm quân sự – 1.000 m). Nhiều tàu ngầm khác của Liên Xô, chẳng hạn như K-19 (tàu ngầm hạt nhân đầu tiên của Liên Xô và là tàu ngầm đầu tiên của Liên Xô đến Bắc Cực) đã bị hư hỏng nặng do hỏa hoạn hoặc rò rỉ phóng xạ. Mỹ mất hai tàu ngầm hạt nhân trong thời gian này: USS Thresher do hỏng thiết bị khi lặn thử khi đang ở giới hạn hoạt động, và USS Scorpion do không rõ nguyên nhân.
Trong thời gian Ấn Độ can thiệp vào Chiến tranh Giải phóng Bangladesh, Hangor của Hải quân Pakistan đã đánh chìm khinh hạm INS Khukri của Ấn Độ. Đây là vụ đánh chìm tàu chiến mặt nước bằng tàu ngầm đầu tiên kể từ Thế chiến II. Trong cùng cuộc chiến, Ghazi, một chiếc tàu ngầm lớp Tench do Mỹ cho Pakistan mượn, đã bị Hải quân Ấn Độ đánh chìm. Đây là tổn thất trong chiến đấu với tàu ngầm đầu tiên kể từ Thế chiến II. Năm 1982 trong Chiến tranh Falklands, tàu tuần dương Argentina General Belgrano bị tàu ngầm HMS Conqueror của Anh đánh chìm, đây là vụ tấn công đầu tiên đánh chìm một tàu chiến mặt nước bởi một tàu ngầm chạy bằng năng lượng hạt nhân trong chiến tranh. Vài tuần sau, vào ngày 16/6, trong Chiến tranh Liban, một tàu ngầm Israel vô danh đã phóng ngư lôi và đánh chìm tàu chở dầu Transit của Liban, đang chở 56 người tị nạn Palestine đến Síp, với niềm tin rằng con tàu này đang sơ tán lực lượng dân quân chống Israel. Con tàu bị trúng hai quả ngư lôi, cố gắng lao lên cạn nhưng cuối cùng bị chìm. Có 25 người chết, bao gồm cả thuyền trưởng. Hải quân Israel tiết lộ vụ việc vào tháng 11/2018.
Thế kỷ XXI
Sử dụng trong quân sự
Trước và trong Thế chiến II, vai trò chính của tàu ngầm là tác chiến chống tàu mặt nước. Tàu ngầm sẽ tấn công trên mặt nước bằng súng boong hoặc khi lặn bằng ngư lôi. Chúng đặc biệt hiệu quả trong việc đánh chìm các tàu vận tải xuyên Đại Tây Dương của quân Đồng minh trong cả hai cuộc Thế chiến và làm gián đoạn các tuyến đường tiếp tế cũng như các hoạt động hải quân của Nhật Bản ở Thái Bình Dương trong Thế chiến II.
Tàu ngầm rải mìn được phát triển vào đầu thế kỷ XX. Tiện ích này đã được sử dụng trong cả hai cuộc Thế chiến. Tàu ngầm cũng được sử dụng để đưa vào và thoát ra các đặc nhiệm bí mật và lực lượng quân sự trong các hoạt động đặc biệt, để thu thập thông tin tình báo và giải cứu phi hành đoàn trong các cuộc không kích vào các đảo, nơi các phi công sẽ được thông báo về những nơi an toàn để hạ cánh và tàu ngầm có thể giải cứu họ. Tàu ngầm có thể chở hàng hóa qua vùng biển thù địch hoặc đóng vai trò là tàu tiếp tế cho các tàu ngầm khác.
Các tàu ngầm thường chỉ có thể xác định vị trí và tấn công các tàu ngầm khác trên bề mặt, mặc dù HMS Venturer đã đánh chìm được U-864 bằng 4 quả ngư lôi trong khi cả hai đều lặn trong nước. Người Anh đã phát triển một loại tàu ngầm chống ngầm chuyên dụng trong Thế chiến I, lớp R. Sau Thế chiến II, với sự phát triển của ngư lôi dẫn đường, hệ thống sonar tốt hơn và động cơ đẩy hạt nhân, các tàu ngầm cũng có thể săn lùng nhau một cách hiệu quả.
Sự phát triển của tên lửa đạn đạo phóng từ tàu ngầm và tên lửa hành trình phóng từ tàu ngầm đã mang lại cho tàu ngầm khả năng đáng kể và tầm xa để tấn công các mục tiêu trên bộ và trên biển bằng nhiều loại vũ khí khác nhau, từ bom chùm đến vũ khí hạt nhân.
Khả năng phòng thủ chính của tàu ngầm nằm ở khả năng ẩn mình dưới đáy đại dương. Những chiếc tàu ngầm ban đầu có thể được phát hiện bằng âm thanh mà chúng tạo ra. Nước là một chất dẫn âm thanh tuyệt vời (tốt hơn nhiều so với không khí) và tàu ngầm có thể phát hiện và theo dõi các tàu mặt nước tương đối ồn ào từ khoảng cách xa. Các tàu ngầm hiện đại được chế tạo chú trọng vào khả năng tàng hình. Các thiết kế cánh quạt tiên tiến, lớp cách âm giảm âm rộng rãi và máy móc đặc biệt giúp tàu ngầm hoạt động yên tĩnh như tiếng ồn xung quanh đại dương, khiến chúng khó bị phát hiện. Cần có công nghệ chuyên dụng để tìm và tấn công các tàu ngầm hiện đại.
Sonar chủ động sử dụng sự phản xạ của âm thanh phát ra từ thiết bị tìm kiếm để phát hiện tàu ngầm. Nó đã được sử dụng từ Thế chiến II bởi tàu mặt nước, tàu ngầm và máy bay (thông qua phao thả và mảng “nhúng” máy bay trực thăng), nhưng nó tiết lộ vị trí của bộ phát và dễ bị phản công.
Một tàu ngầm quân sự được che giấu là một mối đe dọa thực sự và do khả năng tàng hình của nó, có thể buộc hải quân đối phương lãng phí nguồn lực để tìm kiếm các khu vực rộng lớn trên đại dương và bảo vệ tàu khỏi bị tấn công. Lợi thế này đã được chứng minh một cách sinh động trong Chiến tranh Falklands năm 1982 khi tàu ngầm chạy bằng năng lượng hạt nhân HMS Conqueror của Anh đánh chìm tàu tuần dương General Belgrano của Argentina. Sau vụ chìm tàu, Hải quân Argentina nhận ra rằng họ không có khả năng phòng thủ hiệu quả trước cuộc tấn công của tàu ngầm, và hạm đội mặt nước Argentina đã rút về cảng trong thời gian còn lại của cuộc chiến, mặc dù một tàu ngầm Argentina vẫn ở trên biển.
Sử dụng trong dân sự
Mặc dù phần lớn các tàu ngầm trên thế giới là quân sự, nhưng có một số tàu ngầm dân sự, được sử dụng cho mục đích du lịch, thăm dò, kiểm tra giàn khoan dầu khí và khảo sát đường ống. Một số cũng được sử dụng trong các hoạt động bất hợp pháp.
Dịch vụ du hành bằng tàu ngầm mở cửa tại Disneyland vào năm 1959, nhưng mặc dù nó chạy dưới nước nhưng nó không phải là một chiếc tàu ngầm thực sự, vì nó chạy trên đường ray và mở ra bầu khí quyển. Tàu ngầm du lịch đầu tiên là Auguste Piccard, đi vào hoạt động năm 1964 tại Expo64. Đến năm 1997 đã có 45 tàu ngầm du lịch hoạt động trên khắp thế giới. Các tàu ngầm có độ sâu giới hạn trong khoảng 120-150 m được vận hành ở một số khu vực trên toàn thế giới, thường có độ sâu đáy khoảng 30-37 m, với sức chở 50-100 hành khách.
Trong một hoạt động điển hình, một tàu mặt nước chở hành khách đến một khu vực hoạt động ngoài khơi và đưa họ vào tàu ngầm. Sau đó, tàu ngầm thăm các điểm ưa thích dưới nước như cấu trúc rạn san hô tự nhiên hoặc nhân tạo. Để nổi lên mặt nước một cách an toàn mà không có nguy cơ va chạm, vị trí của tàu ngầm được đánh dấu bằng một lỗ thoát khí và việc di chuyển lên mặt nước được điều phối bởi một người quan sát trên một phương tiện hỗ trợ.
Một sự phát triển gần đây là việc triển khai cái gọi là tàu ngầm ma túy của những kẻ buôn lậu ma túy Nam Mỹ để trốn tránh sự phát hiện của cơ quan thực thi pháp luật. Mặc dù đôi khi họ triển khai các tàu ngầm thực sự, nhưng hầu hết đều là tàu ngầm bán lặn tự hành, trong đó một phần của tàu luôn ở trên mặt nước. Tháng 9/2011, nhà chức trách Colombia thu giữ một tàu lặn dài 16 m có thể chứa thủy thủ đoàn 5 người, trị giá khoảng 2 triệu USD. Con tàu thuộc về phiến quân FARC và có khả năng chở ít nhất 7 tấn ma túy.
Hoạt động ở vùng cực
1903 – Tàu ngầm Simon Lake nổi lên qua lớp băng ngoài khơi Newport, Rhode Island.
1930 – USS O-12 hoạt động dưới lớp băng gần Spitsbergen.
1937 – Tàu ngầm Liên Xô Krasnogvardeyets hoạt động dưới băng ở eo biển Đan Mạch.
1941-45 – Tàu ngầm Đức hoạt động dưới băng từ Biển Barents đến Biển Laptev.
1946 – USS Atule đã sử dụng máy đo độ sâu hướng lên trong Chiến dịch Nanook ở eo biển Davis.
1946-47 – USS Sennet sử dụng sonar dưới băng trong Chiến dịch Nhảy cao (Operation High Jump) ở Nam Cực.
1947 – USS Boarfish đã sử dụng máy đo tiếng vang hướng lên dưới lớp băng ở biển Chukchi.
1948 – USS Carp đã phát triển các kỹ thuật để tạo ra các đường dốc và dốc thẳng đứng thông qua các polynyas ở Biển Chukchi.
1952 – USS Redfish đã sử dụng một mảng âm thanh hướng lên được mở rộng ở Biển Beaufort.
1957 – USS Nautilus đạt 87 độ về phía Bắc gần Spitsbergen.
3/8/1958 – Nautilus sử dụng hệ thống định vị quán tính để đến Bắc Cực.
17/3/1959 – USS Skate nổi lên qua lớp băng ở Bắc Cực.
1960 – USS Sargo đi qua 1.400 km dưới lớp băng trên thềm nông (sâu 38-55 m) thềm lục địa Bering-Chukchi.
1960 – USS Seadragon đi qua Hành lang Tây Bắc dưới băng.
1962 – Tàu ngầm lớp tháng 11 của Liên Xô K-3 Leninsky Komsomol đến Bắc Cực.
1970 – USS Queenfish thực hiện một cuộc khảo sát lập bản đồ dưới biển sâu rộng về thềm lục địa Siberia.
1971 – HMS Dreadnought đến Bắc Cực.
USS Gurnard đã tiến hành ba cuộc tập trận vùng cực: 1976 (có diễn viên Mỹ Charlton Heston trên tàu); 1984 hoạt động chung với USS Pintado; và năm 1990 tập trận chung với USS Seahorse.
Ngày 6/5/ăm 1986 – USS Ray, USS Archerfish và USS Hawkbill gặp nhau và cùng nhau nổi lên tại Bắc Cực. Ba chiếc tàu ngầm đầu tiên nổi lên ở Cực.
19/5/1987 – HMS Superb gia nhập USS Billfish và USS Sea Devil tại Bắc Cực.
3/2007 – USS Alexandria tham gia Cuộc tập trận trên băng chung của Hải quân Hoa Kỳ/Hải quân Hoàng gia Anh năm 2007 (ICEX-2007) ở Bắc Băng Dương cùng với tàu ngầm lớp Trafalgar HMS Tireless.
3/2009 – USS Annapolis tham gia Cuộc tập trận Băng 2009 để kiểm tra khả năng hoạt động của tàu ngầm và khả năng tác chiến trong điều kiện Bắc Cực.
Lặn xuống và nổi lên
Tất cả các tàu mặt nước, cũng như tàu ngầm khi nổi, đều ở trạng thái nổi chủ động, trọng lượng nhẹ hơn thể tích nước mà chúng sẽ chiếm chỗ nếu chìm hoàn toàn. Để lặn dưới nước theo phương pháp thủy tĩnh, một con tàu phải có lực nổi âm, bằng cách tăng trọng lượng của chính nó hoặc giảm lượng chiếm nước của nó. Để kiểm soát lượng giãn nước và trọng lượng của chúng, tàu ngầm có các két dằn, có thể chứa các lượng nước và không khí khác nhau.
Để lặn hoặc nổi lên nói chung, tàu ngầm sử dụng két dằn chính MBT (main ballast tanks), là két chịu áp xung quanh, chứa đầy nước để lặn hoặc chứa không khí để nổi lên. Trong khi lặn dưới nước, MBT thường vẫn bị ngập nước, điều này giúp đơn giản hóa thiết kế của chúng và trên nhiều tàu ngầm, những két này là một phần của không gian giữa vỏ nhẹ và vỏ chịu áp. Để kiểm soát độ sâu chính xác hơn, tàu ngầm sử dụng các két kiểm soát độ sâu DCT (depth control tanks) nhỏ hơn – còn được gọi là két cứng (do khả năng chịu được áp suất cao hơn) hoặc két cắt. Đây là những két có áp suất nổi thay đổi được, một loại thiết bị kiểm soát độ nổi. Lượng nước trong két kiểm soát độ sâu có thể được điều chỉnh để thay đổi độ sâu thủy tĩnh hoặc để duy trì độ sâu không đổi khi các điều kiện bên ngoài (chủ yếu là mật độ nước) thay đổi. Các két kiểm soát độ sâu có thể được đặt gần trọng tâm của tàu ngầm, để giảm thiểu ảnh hưởng đến độ nghiêng hoặc tách biệt dọc theo chiều dài của thân tàu để chúng cũng có thể được sử dụng để điều chỉnh độ nghiêng tĩnh bằng cách chuyển nước giữa chúng.
Khi lặn dưới nước, áp suất nước lên thân tàu ngầm có thể đạt tới 4 MPa (580 psi) đối với tàu ngầm thép và lên tới 10 MPa (1.500 psi) đối với tàu ngầm titan như K-278 Komsomolets, trong khi áp suất bên trong tương đối không thay đổi. Sự khác biệt này dẫn đến lực nén lên thân tàu, làm giảm thể tích của tàu (lượng giãn nước). Mật độ nước cũng tăng nhẹ theo độ sâu, vì độ mặn và áp suất cao hơn. Sự thay đổi mật độ này bù đắp không hoàn toàn cho lực nén lên thân tàu, do đó sức nổi giảm khi độ sâu tăng. Một chiếc tàu ngầm lặn ở trạng thái cân bằng không ổn định, có xu hướng chìm hoặc nổi lên mặt nước. Giữ độ sâu không đổi đòi hỏi hoạt động liên tục của két kiểm soát độ sâu hoặc kiểm soát bề mặt.
Các tàu ngầm trong điều kiện cân bằng về bản chất không hoàn toàn ổn định. Để duy trì độ nghiêng chiều dọc như mong muốn, tàu ngầm sử dụng các két nghiêng dọc phía trước và phía sau. Máy bơm di chuyển nước giữa các két, thay đổi sự phân bổ trọng lượng về mũi hoặc về lái. Một hệ thống tương tự có thể được sử dụng để duy trì độ nghiêng ngang.
Điều khiển trên mặt nước
Hiệu ứng thủy tĩnh của các két dằn thay đổi không phải là cách duy nhất để điều khiển tàu ngầm dưới nước. Cơ động thủy động được thực hiện bởi một số bánh lái, được gọi chung là bánh lái ngang hoặc lái độ sâu, có thể di chuyển để tạo ra lực thủy động khi tàu ngầm di chuyển thwo phương thẳng đứng với tốc độ đủ lớn. Trong cấu hình đuôi tàu hình chữ thập cổ điển, các bánh lái phía đuôi tàu (bánh lái ngang lái) nằm ngang phục vụ mục đích giống như két lặn, điều khiển lặn nổi. Ngoài ra, hầu hết các tàu ngầm đều có bánh lái ngang phía trước (bánh lái ngang mũi), thường được đặt ở mũi tàu cho đến những năm 1960 nhưng thường gắn trên tháp chỉ huy trong các thiết kế sau này (bánh lái ngang giữa), nơi chúng gần trọng tâm hơn và có thể kiểm soát độ sâu mà ít ảnh hưởng đến độ lặn nổi.
Một cách rõ ràng để định cấu hình các bánh lái điều khiển ở đuôi tàu ngầm là sử dụng các bánh lái đứng để điều khiển hướng và các bánh lái ngang để điều khiển độ sâu, khiến chúng có hình chữ thập “+” khi nhìn từ phía sau tàu. Trong cấu hình này, từ lâu vẫn là cấu hình chiếm ưu thế, các bánh lái ngang được sử dụng để điều khiển lặn nổi và các bánh lái đứng đứng để điều khiển hướng (di chuyển theo phương ngang), giống như bánh lái của một con tàu mặt nước.
Ngoài ra, các bánh lái điều khiển phía sau có thể được kết hợp thành thứ được gọi là đuôi chữ “X” (X-stern) hoặc bánh lái chữ “X”. Mặc dù ít trực quan hơn, nhưng cấu hình như vậy hóa ra lại có một số lợi thế so với cách sắp xếp hình chữ thập “+” truyền thống. Đầu tiên, nó cải thiện khả năng cơ động, theo chiều ngang cũng như chiều dọc. Thứ hai, các bề mặt điều khiển ít có khả năng bị hư hại khi lặn xuống hoặc tách khỏi đáy biển cũng như khi neo đậu và thả neo. Cuối cùng, sẽ an toàn hơn ở chỗ một trong hai đường chéo có thể chống lại đường chéo kia đối với chuyển động dọc cũng như ngang nếu một trong số chúng vô tình bị kẹt.
X-stern (lái tàu dạng chữ X) lần đầu tiên được thử nghiệm trong thực tế vào đầu những năm 1960 trên USS Albacore, một tàu ngầm thử nghiệm của Hải quân Hoa Kỳ. Mặc dù sự sắp xếp được cho là có lợi, nhưng nó vẫn không được sử dụng trên các tàu ngầm sản xuất sau đó của Hoa Kỳ do thực tế là nó yêu cầu sử dụng máy tính để điều khiển các bánh lái nhằm đạt được hiệu quả mong muốn. Thay vào đó, tàu đầu tiên sử dụng X-stern trong các hoạt động tiêu chuẩn là Hải quân Thụy Điển với lớp Sjöormen, chiếc tàu ngầm dẫn đầu được hạ thủy vào năm 1967, trước khi Albacore hoàn thành các cuộc chạy thử nghiệm. Vì nó hoạt động rất tốt trong thực tế nên tất cả các lớp tàu ngầm tiếp theo của Thụy Điển (Näcken,lớp Västergötland, Gotland và Blekinge) đã hoặc sẽ đi kèm với bánh lái chữ “X”.
Nhà máy đóng tàu Kockums chịu trách nhiệm thiết kế X-stern trên tàu ngầm Thụy Điển cuối cùng đã xuất khẩu nó sang Australia với lớp Collins cũng như sang Nhật Bản với lớp Sōryū. Với sự ra đời của Type 212, Hải quân Đức và Ý cũng đã giới thiệu nó. Hải quân Hoa Kỳ với lớp Columbia, Hải quân Anh với lớp dreadnought và Hải quân Pháp với lớp Barracuda đều sắp gia nhập gia đình X-stern. Do đó, theo đánh giá của tình hình vào đầu những năm 2020, X-stern sắp trở thành công nghệ thống trị.
Khi một chiếc tàu ngầm thực hiện nổi lên khẩn cấp, tất cả các phương pháp kiểm soát độ sâu và độ nghiêng được sử dụng đồng thời, cùng với việc đẩy tàu lên trên. Việc nổi lên như vậy diễn ra rất nhanh, vì vậy tàu ngầm thậm chí có thể nhảy một phần (vọt) lên khỏi mặt nước, có khả năng làm hỏng các hệ thống của tàu ngầm.
Thân vỏ
Tàu ngầm hiện đại có hình điếu xì gà. Thiết kế này, cũng được sử dụng trong các tàu ngầm thời kỳ đầu, đôi khi được gọi là “thân tàu hình giọt nước”. Nó làm giảm lực cản thủy động khi tàu ngầm đi lặn, nhưng làm giảm khả năng bám biển và tăng lực cản khi đi nổi. Do những hạn chế của hệ thống động lực của các tàu ngầm đời đầu buộc chúng phải hoạt động trên mặt nước hầu hết thời gian, thiết kế thân tàu của chúng là một sự thỏa hiệp. Do tốc độ lặn chậm của các tàu ngầm đó, thường dưới 10 hl/g (18 km/h), lực cản tăng lên khi di chuyển dưới nước có thể chấp nhận được. Vào cuối Thế chiến II, khi công nghệ cho phép hoạt động lặn nhanh hơn và lâu hơn, đồng thời tăng cường giám sát máy bay buộc tàu ngầm phải ở dưới nước, thiết kế thân tàu lại có hình giọt nước để giảm lực cản và tiếng ồn. USS Albacore (AGSS-569) là một tàu ngầm nghiên cứu độc đáo đi tiên phong trong phiên bản Hoa Kỳ về dạng thân tàu hình giọt nước (đôi khi được gọi là “thân tàu Albacore”) của các tàu ngầm hiện đại. Trên các tàu ngầm quân sự hiện đại, vỏ ngoài được phủ một lớp cao su hấp thụ âm thanh, hoặc lớp mạ, bọc chống dội âm, để giảm khả năng bị phát hiện.
Thân tàu chịu áp của các tàu ngầm lặn sâu như DSV Alvin có dạng hình cầu thay vì hình trụ. Điều này cho phép phân bổ ứng suất đồng đều hơn và sử dụng vật liệu hiệu quả hơn để chịu áp lực bên ngoài vì nó mang lại thể tích bên trong lớn nhất cho trọng lượng kết cấu và là hình dạng hiệu quả nhất để tránh biến dạng khi chịu nén. Một bộ khung sườn thường được gắn vào bên ngoài thân chịu áp – chứa hệ thống két lặn nổi, cân bằng, chai khí nén, các lượng dằn phụ, chiếu sáng…
Một kết cấu hình tháp nhô lên phía trên đỉnh của một chiếc tàu ngầm tiêu chuẩn (người Việt gọi là “tháp chủ huy”) chứa các cột kính tiềm vọng, thiết bị điện tử, vô tuyến điện, radar, tác chiến điện tử và các hệ thống khác. Nó cũng có thể bao gồm một ống hút khí (ống thở). Trong nhiều lớp tàu ngầm đầu tiên, phòng điều khiển, hay “conn”, được đặt bên trong kết cấu này, được gọi là “tháp chỉ huy”. Kể từ đó, conn đã được đặt bên trong thân tàu ngầm và kết cấu hiện được gọi là “sail” (buồng lái) hoặc “fin” (vây). Conn khác với “bridge” (đài chỉ huy của thuyền thưởng), một bục nhỏ mở ở phía trên cùng của khối thiết kế này, được sử dụng để quan sát trong quá trình hoạt động trên bề mặt.
“Bathtubs” có liên quan đến tháp chỉ huy nhưng được sử dụng trên các tàu ngầm nhỏ hơn. Bathtub là một khối trụ kim loại bao quanh cửa sập để ngăn sóng đánh trực tiếp vào cabin. Nó là cần thiết bởi vì các tàu ngầm khi nổi có mạn khô hạn chế, nghĩa là chúng nằm ở vị trí thấp trong nước. Bathtub giúp tránh làm ngập tàu.
Thân đơn và đôi
Các tàu ngầm và tàu lặn hiện đại, cũng như các mẫu đầu tiên, thường được thiết kế một thân. Các tàu ngầm lớn thường có thêm một thân tàu hoặc phần thân tàu bên ngoài. Lớp vỏ bên ngoài này, thực sự tạo thành hình dạng của tàu ngầm, được gọi là lớp vỏ bên ngoài (vỏ bọc trong Hải quân Hoàng gia Anh) hoặc lớp vỏ nhẹ, vì nó không phải chịu chênh lệch áp suất. Bên trong thân tàu bên ngoài có một thân tàu chắc chắn, hay còn gọi là vỏ chịu áp lực, chịu được áp suất nước biển và có áp suất khí quyển bình thường bên trong.
Ngay từ Thế chiến I, người ta đã nhận ra rằng hình dạng tối ưu để chịu áp lực mâu thuẫn với hình dạng tối ưu để đi biển và lực cản tối thiểu trên bề mặt, và những khó khăn trong xây dựng càng làm phức tạp thêm vấn đề. Điều này đã được giải quyết bằng một hình dạng thỏa hiệp hoặc bằng cách sử dụng hai lớp vỏ tàu: lớp vỏ bên trong chịu được áp suất và lớp vỏ bên ngoài cho hình dạng thủy động lực học. Cho đến cuối Thế chiến II, hầu hết các tàu ngầm đều có thêm một phần vỏ ở phía trên, mũi và lái tàu, được chế tạo bằng kim loại mỏng hơn, vốn bị ngập nước khi lặn. Đức tiến xa hơn với Type XXI, tiền thân chung của tàu ngầm hiện đại, trong đó thân áp suất được bao bọc hoàn toàn bên trong vỏ nhẹ, nhưng được tối ưu hóa để điều hướng dưới nước, không giống như các thiết kế trước đó được tối ưu hóa cho hoạt động trên mặt nước.
Sau Thế chiến II, các phương pháp tiếp cận bị chia rẽ. Liên Xô đã thay đổi thiết kế của mình, dựa trên sự phát triển của Đức. Tất cả các tàu ngầm hạng nặng của Liên Xô và Nga sau Thế chiến II đều được chế tạo với cấu trúc thân kép. Các tàu ngầm của Mỹ và hầu hết các nước phương Tây khác chuyển sang cách tiếp cận chủ yếu là một thân tàu. Chúng vẫn có các phần thân nhẹ ở mũi và đuôi, nơi chứa các két dằn chính và mang lại hình dạng tối ưu hóa về mặt thủy động học, nhưng phần thân hình trụ chính chỉ có một lớp thép duy nhất. Vỏ kép đang được xem xét cho các tàu ngầm tương lai của Hoa Kỳ để cải thiện khả năng tải trọng, khả năng tàng hình và tầm hoạt động.
Vỏ chịu áp lực
Vỏ tàu chịu áp lực thường được chế tạo bằng thép dày cường độ cao, có kết cấu phức tạp, dự trữ cường độ cao, được ngăn cách bằng các vách ngăn kín nước thành nhiều khoang. Ngoài ra còn có các ví dụ về nhiều hơn hai thân tàu ngầm, như lớp Typhoon, có hai thân áp suất chính và ba thân nhỏ hơn cho phòng điều khiển, ngư lôi và thiết bị lái, với hệ thống phóng tên lửa giữa các thân chính, tất cả đều được bao quanh và được hỗ trợ bởi thân tàu thủy động nhẹ bên ngoài. Khi chìm dưới nước, thân tàu chịu áp lực cung cấp phần lớn lực nổi cho toàn bộ tàu.
Không thể tăng độ sâu lặn dễ dàng. Đơn giản chỉ cần làm cho thân tàu dày hơn sẽ làm tăng trọng lượng kết cấu và yêu cầu giảm trọng lượng thiết bị trên tàu, đồng thời tăng đường kính yêu cầu tăng độ dày theo tỷ lệ đối với cùng một vật liệu và cấu trúc, cuối cùng dẫn đến thân tàu chịu áp lực không có đủ lực nổi để hỗ trợ trọng lượng thân tàu, như trong một tàu lặn thăm dò biển sâu. Điều này có thể chấp nhận được đối với các tàu lặn nghiên cứu dân sự, nhưng không phải là tàu ngầm quân sự, vốn cần mang theo một lượng lớn thiết bị, thủy thủ đoàn và vũ khí để hoàn thành chức năng của chúng. Vật liệu xây dựng với cường độ cụ thể lớn hơn và mô-đun cụ thể là cần thiết.
Tàu ngầm WWI có vỏ bằng thép cacbon, với độ sâu tối đa 100 m. Trong Thế chiến II, thép hợp kim cường độ cao đã được giới thiệu, cho phép lặn sâu 200 m. Thép hợp kim cường độ cao vẫn là vật liệu chính cho tàu ngầm ngày nay, với độ sâu 250-400 m, không thể vượt quá đối với tàu ngầm quân sự nếu không có sự thỏa hiệp về thiết kế. Để vượt qua giới hạn đó, một số tàu ngầm được chế tạo bằng vỏ titan. Hợp kim titan có thể mạnh hơn thép, nhẹ hơn và quan trọng nhất là có cường độ riêng và mô-đun cụ thể khi ngâm nước cao hơn. Titan cũng không sắt từ, quan trọng cho tàng hình. Tàu ngầm titan được chế tạo bởi Liên Xô, nơi đã phát triển các hợp kim có độ bền cao chuyên dụng. Nó đã sản xuất một số loại tàu ngầm titan. Hợp kim titan cho phép tăng đáng kể độ sâu, nhưng các hệ thống khác phải được thiết kế lại để đối phó, vì vậy độ sâu thử nghiệm được giới hạn ở 1.000 m đối với tàu ngầm Liên Xô K-278 Komsomolets, tàu ngầm chiến đấu lặn sâu nhất. Một chiếc tàu ngầm lớp Alfa có thể đã hoạt động thành công ở độ sâu 1.300 m, mặc dù hoạt động liên tục ở độ sâu như vậy sẽ tạo ra căng thẳng quá mức đối với nhiều hệ thống tàu ngầm. Titan không uốn cong dễ dàng như thép và có thể trở nên giòn sau nhiều chu kỳ lặn. Bất chấp những lợi ích của nó, chi phí chế tạo titan cao đã dẫn đến việc từ bỏ việc chế tạo tàu ngầm titan khi Chiến tranh Lạnh kết thúc. Các tàu ngầm dân dụng lặn sâu đã sử dụng lớp vỏ áp suất acrylic dày. Mặc dù cường độ riêng và mô-đun riêng của acrylic không cao lắm, nhưng mật độ chỉ là 1,18g/cm3, do đó, nó chỉ đặc hơn nước rất ít và mức suy giảm về độ nổi của độ dày tăng lên tương ứng thấp.
Phương tiện lặn sâu nhất (DSV) cho đến nay là Trieste. Vào ngày 5/10/1959, Trieste rời San Diego đến Guam trên chiếc chuyên cơ chở hàng Santa Maria để tham gia Dự án Nekton, một loạt các chuyến lặn rất sâu ở rãnh Mariana. Vào ngày 23/1/1960, Trieste chạm tới đáy đại dương ở Challenger Deep (phần sâu nhất phía nam của rãnh Mariana), mang theo Jacques Piccard (con trai của Auguste) và Trung úy Don Walsh, USN. Đây là lần đầu tiên một con tàu, có thủy thủ đoàn hoặc không có thủy thủ đoàn, đã đến điểm sâu nhất trong các đại dương của Trái đất. Các hệ thống trên tàu chỉ ra độ sâu là 11.521 m, mặc dù điều này sau đó đã được sửa đổi thành 10.916 m và các phép đo chính xác hơn được thực hiện vào năm 1995 đã phát hiện ra rằng Challenger Deep nông hơn một chút, ở mức 10.911 m.
Việc chế tạo một thân tàu chịu áp lực rất khó khăn vì nó phải chịu được áp suất ở độ sâu lặn cần thiết. Khi thân tàu có mặt cắt ngang hoàn toàn tròn, áp suất được phân bổ đều và chỉ gây ra lực nén thân tàu. Nếu hình dạng không hoàn hảo, thân tàu sẽ bị lệch nhiều hơn ở một số chỗ và biến dạng là tình trạng hư hỏng thông thường. Các vòng gia cố chống lại những sai lệch nhỏ không thể tránh khỏi, nhưng thậm chí sai lệch 25 mm so với độ tròn cũng dẫn đến giảm hơn 30% tải trọng thủy tĩnh tối đa và do đó giảm độ sâu lặn. Vì vậy, thân tàu phải được chế tạo với độ chính xác cao. Tất cả các bộ phận của thân tàu phải được hàn không có khuyết tật và tất cả các mối nối được kiểm tra nhiều lần bằng các phương pháp khác nhau, góp phần làm tăng giá thành của các tàu ngầm hiện đại. (Ví dụ, mỗi chiếc tàu ngầm tấn công lớp Virginia có giá 2,6 tỷ USD, trên 200.000 USD cho mỗi tấn lượng giãn nước).
Động lực đẩy
Những chiếc tàu ngầm đầu tiên được đẩy bởi con người. Tàu ngầm điều khiển cơ học đầu tiên là chiếc Plongeur của Pháp năm 1863, sử dụng khí nén để đẩy. Lực đẩy kỵ khí lần đầu tiên được sử dụng bởi Ictineo II của Tây Ban Nha vào năm 1864, sử dụng dung dịch kẽm, mangan điôxit và kali clorat để tạo ra đủ nhiệt cung cấp năng lượng cho động cơ hơi nước, đồng thời cung cấp oxy cho thủy thủ đoàn. Một hệ thống tương tự không được sử dụng lại cho đến năm 1940 khi Hải quân Đức thử nghiệm một hệ thống dựa trên hydro peroxide, tuabin Walter, trên tàu ngầm thử nghiệm V-80 và sau đó là hải quân – tàu ngầm U-791 và Type XVII; hệ thống được phát triển thêm cho lớp Explorer của Anh, hoàn thành vào năm 1958.
Cho đến khi động cơ đẩy biển hạt nhân ra đời, hầu hết các tàu ngầm thế kỷ XX đều sử dụng động cơ điện và ắc-quy để chạy dưới nước và động cơ đốt trong trên bề mặt, và để nạp ắc-quy. Các tàu ngầm ban đầu sử dụng động cơ xăng nhưng điều này nhanh chóng nhường chỗ cho dầu hỏa (paraffin) và sau đó là động cơ diesel vì tính dễ cháy giảm và với động cơ diesel, hiệu suất nhiên liệu được cải thiện và do đó cũng có tầm hoạt động lớn hơn. Sự kết hợp giữa động cơ diesel và động cơ điện đã trở thành tiêu chuẩn.
Ban đầu, động cơ đốt trong và động cơ điện trong hầu hết các trường hợp được kết nối với cùng một trục để cả hai có thể truyền động trực tiếp chân vịt. Động cơ đốt trong được đặt ở đầu phía trước của phần đuôi tàu với động cơ điện phía sau, tiếp theo là trục các đăng. Động cơ diesel được nối với động cơ điện bằng một ly hợp và đến lượt động cơ điện được nối với trục chân vịt bằng một ly hợp khác.
Chỉ với ly hợp phía sau hoạt động, động cơ điện có thể điều khiển chân vịt khi vận hành hoàn toàn dưới nước (khi lặn). Khi cả hai ly hợp đều hoạt động, động cơ đốt trong có thể dẫn động chân vịt như khi đi nổi hoặc khi lặn với ống hút khí. Trong trường hợp này, động cơ điện sẽ đóng vai trò là máy phát điện để nạp ắc-quy hoặc nếu không cần nạp thì có thể quay tự do. Chỉ cần khớp ly hợp phía trước, động cơ đốt trong có thể điều khiển động cơ điện như một máy phát điện để nạp ắc-quy mà không cần đồng thời buộc chân vịt phải chuyển động.
Động cơ có thể có nhiều phần ứng trên trục, có thể được ghép điện nối tiếp đối với tốc độ chậm và song song đối với tốc độ cao (các kết nối này lần lượt được gọi là “nhóm giảm” và “nhóm tăng”).
Truyền động diesel-điện
Trong khi hầu hết các tàu ngầm đời đầu sử dụng kết nối cơ học trực tiếp giữa động cơ đốt trong và chân vịt, thì một giải pháp thay thế đã được xem xét cũng như triển khai ở giai đoạn rất sớm. Giải pháp đó trước tiên bao gồm chuyển đổi công việc của động cơ đốt trong thành năng lượng điện thông qua một máy phát điện chuyên dụng. Năng lượng này sau đó được sử dụng để điều khiển cánh quạt thông qua động cơ điện và, trong phạm vi cần thiết, để nạp ắc-quy. Trong cấu hình này, do đó, động cơ điện chịu trách nhiệm điều khiển chân vịt mọi lúc, bất kể có không khí để động cơ đốt trong hoạt động có thể sử dụng hay không.
Trong số những tàu tiên phong của giải pháp thay thế này là chiếc tàu ngầm đầu tiên của Hải quân Thụy Điển, HMS Hajen (sau đổi tên thành Ub no 1), được hạ thủy vào năm 1904. Mặc dù thiết kế của nó thường được lấy cảm hứng từ chiếc tàu ngầm đầu tiên do Hải quân Hoa Kỳ đưa vào hoạt động, USS Holland, nó đã đi chệch khỏi tàu sau theo ít nhất ba cách quan trọng: bằng cách thêm kính tiềm vọng, bằng cách thay thế động cơ xăng bằng động cơ bán diesel (động cơ bóng đèn nóng chủ yếu được cung cấp nhiên liệu bằng dầu hỏa, sau này được thay thế bằng động cơ diesel thực sự) và bằng cách cắt đứt liên kết cơ khí giữa động cơ đốt trong và chân vịt bằng cách để động cơ đốt trong chạy một máy phát điện chuyên dụng. Bằng cách làm như vậy, cần phải thực hiện ba bước quan trọng để hướng tới công nghệ cuối cùng sẽ trở thành công nghệ thống trị cho tàu ngầm thông thường (tức là phi hạt nhân).
Trong những năm tiếp theo, Hải quân Thụy Điển đã bổ sung thêm 7 tàu ngầm thuộc ba lớp khác nhau (lớp thứ 2, lớp Laxen và lớp Braxen) sử dụng cùng một công nghệ đẩy nhưng được trang bị động cơ diesel thực sự thay vì động cơ bán diesel ngay từ đầu. Kể từ thời điểm đó, công nghệ này thường dựa trên động cơ diesel hơn là một số loại động cơ đốt trong khác, cuối cùng nó được gọi là truyền động diesel-điện.
Giống như nhiều tàu ngầm đời đầu khác, những chiếc ban đầu được thiết kế ở Thụy Điển khá nhỏ (dưới 200 tấn) và do đó chỉ giới hạn trong hoạt động ven biển. Khi Hải quân Thụy Điển muốn bổ sung các tàu lớn hơn, có khả năng hoạt động xa bờ hơn, các thiết kế của họ đã được mua từ các công ty nước ngoài đã có kinh nghiệm cần thiết: đầu tiên là Ý (Fiat – Laurenti) và sau đó là Đức (AG Weser và IvS). Do một tác dụng phụ, hệ thống truyền động diesel-điện tạm thời bị loại bỏ.
Tuy nhiên, hệ truyền động diesel-điện ngay lập tức được giới thiệu lại khi Thụy Điển bắt đầu thiết kế lại tàu ngầm của riêng mình vào giữa những năm 1930. Kể từ thời điểm đó trở đi, nó đã được sử dụng một cách nhất quán cho tất cả các lớp tàu ngầm mới của Thụy Điển, mặc dù được bổ sung động cơ đẩy không phụ thuộc vào không khí (AIP) như được cung cấp bởi động cơ Stirling bắt đầu với HMS Näcken vào năm 1988.
Một nước sớm áp dụng truyền động diesel-điện khác là Hải quân Hoa Kỳ, Cục Kỹ thuật đã đề xuất sử dụng nó vào năm 1928. Sau đó, nó đã được thử trên các tàu ngầm lớp S: S-3, S-6 và S-7 trước khi được đưa vào sản xuất với lớp Porpoise của những năm 1930. Từ thời điểm đó trở đi, nó tiếp tục được sử dụng trên hầu hết các tàu ngầm thông thường của Hoa Kỳ.
Ngoài lớp U của Anh và một số tàu ngầm của Hải quân Đế quốc Nhật Bản sử dụng máy phát điện diesel riêng biệt để chạy ở tốc độ thấp, một số lực lượng hải quân khác ngoài Thụy Điển và Hoa Kỳ đã sử dụng nhiều động cơ diesel-điện trước năm 1945. Sau Thế chiến II ngược lại, nó dần dần trở thành phương thức đẩy chiếm ưu thế đối với các tàu ngầm thông thường. Tuy nhiên, việc áp dụng nó không phải lúc nào cũng nhanh chóng. Đáng chú ý, Hải quân Liên Xô đã không đưa hệ thống truyền động diesel-điện vào các tàu ngầm thông thường của mình cho đến năm 1980 với lớp Paltus.
Nếu hệ thống truyền động diesel-điện chỉ mang lại những ưu điểm và không có nhược điểm so với hệ thống kết nối cơ học động cơ diesel với chân vịt, thì chắc chắn nó đã trở nên thống trị sớm hơn nhiều. Những bất lợi bao gồm những điều sau đây:
– Nó kéo theo việc giảm hiệu suất nhiên liệu cũng như năng lượng bằng cách chuyển đổi đầu ra của động cơ diesel thành điện năng. Mặc dù cả máy phát điện và động cơ điện đều được biết đến là rất hiệu quả, nhưng hiệu suất của chúng vẫn thấp hơn 100%.
– Nó yêu cầu một thành phần bổ sung dưới dạng một máy phát chuyên dụng. Vì động cơ điện luôn được sử dụng để truyền động chân vịt nên nó không thể tiếp tục đảm nhận như một máy phát điện nữa.
– Nó không cho phép động cơ diesel và động cơ điện hợp lực bằng cách điều khiển chân vịt đồng thời bằng cơ học để đạt tốc độ tối đa khi tàu ngầm nổi lên hoặc khi đi chế độ hút khí. Tuy nhiên, điều này có thể có ít tầm quan trọng thực tế vì tùy chọn mà nó ngăn cản là khiến tàu ngầm có nguy cơ phải lặn bằng ắc-quy ít nhất đã cạn kiệt một phần.
Lý do tại sao hệ truyền động diesel-điện đã trở thành phương án thay thế vượt trội bất chấp những nhược điểm này tất nhiên là vì nó cũng có nhiều ưu điểm và xét cho cùng thì những ưu điểm này cuối cùng đã được phát hiện là quan trọng hơn. Những lợi thế bao gồm những điều sau đây:
– Nó làm giảm tiếng ồn bên ngoài bằng cách cắt đứt liên kết cơ học trực tiếp và cứng nhắc giữa một bên là (các) động cơ diesel tương đối ồn ào với (các) trục chân vịt và thân tàu ở bên kia. Với khả năng tàng hình là tối quan trọng đối với tàu ngầm, đây là một lợi thế rất đáng kể.
– Nó làm tăng khả năng sẵn sàng lặn (lặn khẩn cấp), hoạt động có tầm quan trọng sống còn đối với hoạt động của tàu ngầm. Điều duy nhất được yêu cầu từ nguyên tắc vận hành động lực đẩy là tắt khẩn cấp (các) động cơ diesel trước khi lặn xuống.
– Nó làm cho tốc độ của (các) động cơ diesel tạm thời không tương quan với tốc độ của tàu ngầm. Đến lượt nó, điều này thường giúp có thể chạy (các) động cơ diesel ở tốc độ tối ưu để tiết kiệm nhiên liệu cũng như tăng tuổi thọ động cơ. Nó cũng giúp giảm thời gian hành trình nổi nổi, kéo dài thời gian lặn ở chế độ hành trình ống hút khí bằng cách chạy (các) động cơ diesel ở tốc độ tối đa mà không ảnh hưởng đến tốc độ của chính tàu ngầm.
– Nó loại bỏ các ly hợp cần thiết để kết nối động cơ diesel, động cơ điện và trục chân vịt. Điều này lần lượt tiết kiệm không gian, tăng độ tin cậy và giảm chi phí bảo trì.
– Nó tăng tính linh hoạt liên quan đến cách cấu hình, định vị và bảo trì các bộ phận của hệ trục. Ví dụ, động cơ diesel không còn phải thẳng hàng với động cơ điện và trục chân vịt, có thể sử dụng hai động cơ diesel để cung cấp năng lượng cho một chân vịt, hoặc ngược lại có thể chỉ cần chạy một động cơ diesel khi không cần thiết cả hai, hoặc chỉ trong chốc lát có thể cung cấp động lực cho chân vịt từ động cơ điện mà không mất thời gian khởi động động cơ diesel.
– Nó tạo điều kiện tích hợp các nguồn năng lượng sơ cấp bổ sung, bên cạnh (các) động cơ diesel, chẳng hạn như các loại hệ thống năng lượng không phụ thuộc vào không khí (AIP). Với một hoặc nhiều động cơ điện luôn dẫn động (các) cánh quạt, những hệ thống như vậy có thể dễ dàng được giới thiệu như một nguồn năng lượng điện khác ngoài (các) động cơ diesel và pin.
Ống hút khí (ống thở)
Trong Thế chiến II, người Đức đã thử nghiệm ý tưởng về schnorchel (ống thở hay ống hút khí) từ các tàu ngầm Hà Lan bị bắt nhưng không nhận thấy sự cần thiết của chúng cho đến khá muộn trong chiến tranh. Ống hút khí là một đường ống có thể thu vào cung cấp không khí cho động cơ diesel khi lặn ở độ sâu kính tiềm vọng, cho phép tàu ngầm hành trình và nạp ắc-quy trong khi vẫn duy trì mức độ tàng hình nhất định.
Tuy nhiên, đặc biệt là khi lần đầu tiên được triển khai, hóa ra nó không phải là một giải pháp hoàn hảo. Đã xảy ra sự cố với van của thiết bị bị đóng hoặc đóng khi thiết bị chìm trong thời tiết khắc nghiệt. Vì hệ thống sử dụng toàn bộ thân tàu chịu áp làm bộ đệm, động cơ diesel sẽ ngay lập tức hút một lượng không khí khổng lồ từ các khoang của tàu và thủy thủ đoàn thường bị chấn thương tai. Tốc độ hành trình chế độ hút khí được giới hạn ở 8 hl/g (15 km/h), để thiết bị nâng hạ không bị gãy do áp lực nước ngược dòng khi tàu chuyển động. Ống hút khí cũng tạo ra tiếng ồn khiến sonar đối phương dễ phát hiện tàu ngầm hơn, nhưng sonar trên tàu ngầm cũng bất lợi trong phát hiện tín hiệu từ các tàu khác. Cuối cùng, radar của đồng minh cuối cùng đã trở nên đủ tiên tiến để có thể phát hiện ra ống hút khí ngoài đường chân trời (ngoài tầm nhìn mắt thường).
Mặc dù ống hút khí làm cho tàu ngầm khó bị phát hiện hơn, nhưng nó không hoàn hảo. Trong điều kiện thời tiết quang đãng, khí thải của động cơ diesel có thể được nhìn thấy trên bề mặt ở khoảng cách vài km, trong khi vệt nước do kính tiềm vọng hoặc ống hút khí tạo ra có thể nhìn thấy từ xa trong điều kiện biển lặng. Radar hiện đại cũng có khả năng phát hiện ống hút khí trong điều kiện thời tiết tốt.
Vấn đề động cơ diesel gây ra hiện tượng chân không trong tàu ngầm khi van chặn trong vẫn tồn tại ở các mẫu tàu ngầm diesel sau này nhưng được giảm thiểu nhờ các cảm biến ngắt chân không cao giúp tắt động cơ khi độ chân không trong tàu đạt đến mức điểm đặt giới hạn. Cột cảm ứng ống thở hiện đại có thiết kế an toàn khi sử dụng khí nén, được điều khiển bằng một mạch điện đơn giản, để giữ van chặn ngoài mở trước lực kéo của một lò xo mạnh. Nước biển tràn qua ống hút khí làm tắt các điện cực lộ ra trên đỉnh, làm hỏng bộ điều khiển và đóng van ngoài khi nó chìm trong nước. Tàu ngầm Hoa Kỳ đã không áp dụng việc sử dụng ống hút khí cho đến sau Thế chiến II.
Động lực đẩy không phụ thuộc vào không khí (AIP)
Trong Thế chiến II, tàu ngầm Type XXI của Đức (còn được gọi là “Elektroboote”) là tàu ngầm đầu tiên được thiết kế để hoạt động dưới nước trong thời gian dài. Ban đầu, chúng mang theo hydro peroxide để có động cơ đẩy nhanh, không phụ thuộc vào không khí trong thời gian dài, nhưng cuối cùng chúng được chế tạo bằng ắc-quy rất lớn để thay thế. Vào cuối Chiến tranh, người Anh và Liên Xô đã thử nghiệm động cơ hydro peroxide/dầu hỏa (parafin) có thể chạy trên mặt nước và dưới nước. Kết quả không đáng khích lệ. Mặc dù Liên Xô đã triển khai một lớp tàu ngầm với loại động cơ này (tên NATO là Quebec), nhưng chúng được coi là không thành công.
Hoa Kỳ cũng đã sử dụng hydrogen peroxide trong một tàu ngầm mini thử nghiệm, X-1. Ban đầu nó được cung cấp năng lượng bởi một động cơ hydro peroxide/diesel và hệ thống ắc-quy cho đến khi xảy ra vụ nổ nguồn cung cấp hydro peroxide vào ngày 20/5/1957. X-1 sau đó được chuyển đổi sang sử dụng động cơ diesel-điện.
Ngày nay, một số hải quân sử dụng động cơ đẩy không khí độc lập. Đáng chú ý là Thụy Điển sử dụng công nghệ Stirling trên các tàu ngầm lớp Gotland và lớp Södermanland. Động cơ Stirling được làm nóng bằng cách đốt cháy nhiên liệu diesel với oxy lỏng từ bể đông lạnh. Một bước phát triển mới hơn trong động cơ đẩy không phụ thuộc vào không khí là pin nhiên liệu hydro, lần đầu tiên được sử dụng trên tàu ngầm Type 212 của Đức, với chín pin 34 kW hoặc hai pin 120 kW. Pin nhiên liệu cũng được sử dụng trong tàu ngầm lớp S-80 mới của Tây Ban Nha mặc dù với nhiên liệu được lưu trữ dưới dạng ethanol và sau đó được chuyển hóa thành hydro trước khi sử dụng.
Một công nghệ mới đang được giới thiệu bắt đầu với tàu ngầm lớp Sōryū thứ 11 của Hải quân Nhật Bản (JS Ōryū) là loại pin hiện đại hơn, pin lithium-ion. Những loại pin này có khả năng lưu trữ điện gấp đôi so với pin truyền thống và bằng cách thay thế ắc-quy axit-chì trong các khu vực lưu trữ thông thường của chúng cộng với việc lấp đầy không gian thân tàu lớn thường dành cho động cơ AIP và thùng nhiên liệu bằng nhiều tấn pin lithium-ion, các tàu ngầm hiện đại thực sự có thể quay trở lại cấu hình diesel-điện “thuần túy” nhưng vẫn có thêm thời gian hoạt động dưới nước và sức mạnh thường được kết hợp với các tàu ngầm được trang bị AIP.
Điện hạt nhân
Năng lượng hơi nước được hồi sinh vào những năm 1950 với một tuabin hơi nước chạy bằng năng lượng hạt nhân chạy máy phát điện. Bằng cách loại bỏ nhu cầu về oxy trong khí quyển, thời gian mà một chiếc tàu ngầm có thể lặn dưới nước chỉ bị giới hạn bởi nguồn dự trữ thực phẩm của nó, vì không khí thở được tái chế và nước ngọt được chưng cất từ nước biển. Quan trọng hơn, một tàu ngầm hạt nhân có tầm hoạt động không giới hạn ở tốc độ tối đa. Điều này cho phép nó di chuyển từ căn cứ hoạt động đến khu vực chiến đấu trong thời gian ngắn hơn nhiều và khiến nó trở thành mục tiêu khó khăn hơn nhiều đối với hầu hết các loại vũ khí chống ngầm. Tàu ngầm chạy bằng năng lượng hạt nhân có pin tương đối nhỏ và động cơ diesel-máy phát để sử dụng khẩn cấp nếu các lò phản ứng phải ngừng hoạt động.
Năng lượng hạt nhân hiện được sử dụng trong tất cả các tàu ngầm lớn, nhưng do chi phí cao và kích thước lớn của lò phản ứng hạt nhân, các tàu ngầm nhỏ hơn vẫn sử dụng động cơ diesel-điện. Tỷ lệ tàu ngầm lớn hơn và nhỏ hơn phụ thuộc vào nhu cầu chiến lược. Hải quân Hoa Kỳ, Hải quân Pháp và Hải quân Hoàng gia Anh chỉ vận hành tàu ngầm hạt nhân, điều này được giải thích là do nhu cầu hoạt động ở xa. Các nhà khai thác lớn khác dựa vào sự kết hợp giữa tàu ngầm hạt nhân cho các mục đích chiến lược và tàu ngầm diesel-điện để phòng thủ. Hầu hết các hạm đội không có tàu ngầm hạt nhân do hạn chế về năng lượng hạt nhân và công nghệ tàu ngầm.
Tàu ngầm diesel-điện có lợi thế tàng hình so với các tàu ngầm hạt nhân. Tàu ngầm hạt nhân tạo ra tiếng ồn từ máy bơm nước làm mát và máy móc tua-bin cần thiết để vận hành lò phản ứng, ngay cả ở mức năng lượng thấp. Một số tàu ngầm hạt nhân như lớp Ohio của Mỹ có thể hoạt động với máy bơm làm mát lò phản ứng được bảo đảm, khiến chúng hoạt động êm hơn so với tàu ngầm điện. Một chiếc tàu ngầm thông thường hoạt động bằng pin gần như hoàn toàn im lặng, tiếng ồn duy nhất phát ra từ ổ trục, chân vịt và tiếng ồn của dòng chảy quanh thân tàu, tất cả đều dừng lại khi tàu ngầm lơ lửng trong nước để lắng nghe, chỉ còn lại tiếng ồn từ hoạt động của thủy thủ đoàn. Tàu ngầm thương mại thường chỉ dựa vào pin, vì chúng hoạt động cùng với tàu mẹ.
Một số tai nạn hạt nhân và bức xạ nghiêm trọng có liên quan đến tai nạn tàu ngầm hạt nhân. Vụ tai nạn lò phản ứng K-19 trên tàu ngầm Liên Xô năm 1961 khiến 8 người thiệt mạng và hơn 30 người khác bị nhiễm phóng xạ quá mức. Vụ tai nạn lò phản ứng K-27 của tàu ngầm Liên Xô năm 1968 khiến 9 người thiệt mạng và 83 người khác bị thương. Vụ tai nạn tàu ngầm K-431 của Liên Xô năm 1985 khiến 10 người thiệt mạng và 49 người khác bị thương do phóng xạ.
Giải pháp khác
Tua bin hơi nước đốt dầu cung cấp năng lượng cho các tàu ngầm lớp K của Anh, được chế tạo trong Thế chiến I và sau đó, để cung cấp cho chúng tốc độ bề mặt để theo kịp hạm đội chiến đấu. Tuy nhiên, các tàu ngầm lớp K không thành công đáng kể.
Vào cuối thế kỷ XX, một số tàu ngầm chẳng hạn như lớp Vanguard của Anh – bắt đầu được trang bị động cơ đẩy phản lực bơm thay vì chân vịt. Mặc dù những thứ này nặng hơn, đắt hơn và kém hiệu quả hơn chân vịt, nhưng chúng yên tĩnh hơn đáng kể, mang lại lợi thế chiến thuật quan trọng.
Vũ khí
Thành công của tàu ngầm gắn bó chặt chẽ với sự phát triển của ngư lôi, được phát minh bởi Robert Whitehead vào năm 1866. Phát minh của ông bây giờ về cơ bản giống như 140 năm trước. Chỉ với ngư lôi tự hành, tàu ngầm mới có thể tạo ra bước nhảy vọt từ sự mới lạ thành vũ khí chiến tranh. Cho đến khi ngư lôi dẫn đường hoàn thiện, cần phải có nhiều ngư lôi “bắn thẳng” để tấn công mục tiêu. Với tối đa 20 đến 25 quả ngư lôi được mang theo trên tàu, số lần tấn công bị hạn chế. Để tăng khả năng chiến đấu, hầu hết các tàu ngầm trong Thế chiến I đều hoạt động như pháo hạm lặn, sử dụng pháo trên boong của chúng chống lại các mục tiêu không có vũ khí, và lặn để trốn thoát và giao chiến với tàu chiến của đối phương. Tầm quan trọng của pháo đã khuyến khích sự phát triển của tàu tuần dương không thành công như Surcouf của Pháp và các tàu ngầm lớp X1 và M của Hải quân Hoàng gia Anh. Với sự xuất hiện của máy bay tác chiến chống ngầm (ASW), pháo trở nên dùng để phòng thủ hơn là tấn công. Một phương pháp thiết thực hơn để tăng sức chịu đựng chiến đấu là ống phóng ngư lôi bên ngoài, chỉ nạp trong cảng.
Khả năng của các tàu ngầm tiếp cận các bến cảng của đối phương một cách bí mật đã dẫn đến việc chúng được sử dụng như những tàu đặt mìn. Tàu ngầm rải mìn trong Thế chiến I và Thế chiến II được chế tạo đặc biệt cho mục đích đó. Các loại mìn mang theo trên tàu ngầm hiện đại, chẳng hạn như Mark 5 Stonefish và Mark 6 Sea Urchin của Anh, có thể được triển khai từ các ống phóng ngư lôi của tàu ngầm.
Sau Thế chiến II, cả Hoa Kỳ và Liên Xô đều thử nghiệm các tên lửa hành trình phóng từ tàu ngầm như SSM-N-8 Regulus và P-5 Pyatyorka. Những tên lửa như vậy yêu cầu tàu ngầm phải nổi lên để bắn tên lửa. Chúng là tiền thân của tên lửa hành trình phóng từ tàu ngầm hiện đại, có thể bắn từ ống phóng ngư lôi của tàu ngầm đang lặn, chẳng hạn như BGM-109 Tomahawk của Mỹ và RPK-2 Viyuga của Nga và các phiên bản tên lửa đất đối đất chống hạm. tên lửa như Exocet và Harpoon, đóng gói để phóng tàu ngầm. Tên lửa đạn đạo cũng có thể được bắn từ ống phóng ngư lôi của tàu ngầm, chẳng hạn như tên lửa chống tàu ngầm SUBROC. Với khối lượng bên trong hạn chế hơn bao giờ hết và mong muốn mang theo các đầu đạn nặng hơn, ý tưởng về ống phóng bên ngoài đã được hồi sinh, thường dành cho tên lửa được đóng gói, với các ống như vậy được đặt giữa áp suất bên trong và thân tàu được sắp xếp hợp lý bên ngoài.
Nhiệm vụ chiến lược của SSM-N-8 và P-5 được thực hiện bằng tên lửa đạn đạo phóng từ tàu ngầm, bắt đầu bằng tên lửa Polaris của Hải quân Hoa Kỳ, và sau đó là tên lửa Poseidon và Trident.
Đức đang nghiên cứu tên lửa IDAS tầm ngắn phóng từ ống phóng ngư lôi, có thể được sử dụng để chống lại máy bay trực thăng ASW, cũng như tàu mặt nước và các mục tiêu ven biển.
Cảm biến (khí tài)
Một chiếc tàu ngầm có thể có nhiều loại cảm biến, tùy thuộc vào nhiệm vụ của nó. Các tàu ngầm quân sự hiện đại phụ thuộc gần như hoàn toàn vào một bộ sonar thụ động và chủ động để xác định mục tiêu. Sonar chủ động dựa vào tiếng “ping” có thể nghe được để tạo ra tiếng vang nhằm phát hiện các vật thể xung quanh tàu ngầm. Các hệ thống đang hoạt động hiếm khi được sử dụng, vì làm như vậy sẽ tiết lộ sự hiện diện của tàu ngầm. Sonar thụ động là một tập hợp các ống nghe dưới nước nhạy cảm được đặt vào thân tàu hoặc được kéo theo một mảng phía sau, thường kéo dài vài trăm m phía sau tàu ngầm. Mảng kéo là trụ cột chính của các hệ thống phát hiện tàu ngầm của NATO, vì nó làm giảm tiếng ồn dòng chảy mà người vận hành nghe thấy. Sonar gắn trên thân tàu được sử dụng cùng với mảng được kéo, vì mảng được kéo không thể hoạt động ở độ sâu nông và trong quá trình điều động. Ngoài ra, sonar có một điểm mù “xuyên qua” tàu ngầm, vì vậy một hệ thống ở cả phía trước và phía sau hoạt động để loại bỏ vấn đề đó. Khi mảng kéo đi phía sau và bên dưới tàu ngầm, đường xoáy nhiệt ở độ sâu thích hợp; âm thanh đi qua đường nhiệt bị biến dạng dẫn đến phạm vi phát hiện thấp hơn.
Tàu ngầm cũng mang theo thiết bị radar để phát hiện tàu mặt nước và máy bay. Thuyền trưởng tàu ngầm có nhiều khả năng sử dụng thiết bị phát hiện radar hơn là radar chủ động để phát hiện mục tiêu, vì radar có thể được phát hiện vượt xa phạm vi quay trở lại của chính nó, làm phát hiện ra tàu ngầm. Kính tiềm vọng hiếm khi được sử dụng, ngoại trừ để hành trình chế độ hút khí và kiểm tra mặt biển khi lặn, nổi hay để xác minh danh tính của đối tượng liên hệ.
Các tàu ngầm dân sự, chẳng hạn như DSV Alvin hoặc tàu lặn Mir của Nga, dựa vào các bộ sonar hoạt động nhỏ và các cổng quan sát để điều hướng. Mắt người không thể phát hiện ánh sáng mặt trời ở độ sâu khoảng 90 m dưới nước, vì vậy đèn công suất lớn được sử dụng để chiếu sáng khu vực quan sát.
Dẫn đường
Các tàu ngầm đời đầu có ít thiết bị hỗ trợ dẫn đường, nhưng các tàu ngầm hiện đại có nhiều hệ thống định vị khác nhau. Các tàu ngầm quân sự hiện đại sử dụng hệ thống dẫn đường quán tính để điều hướng khi lặn, nhưng lỗi trôi dạt không thể tránh khỏi được hình thành theo thời gian. Để chống lại điều này, thjuyr thủ đoàn thỉnh thoảng sử dụng Hệ thống định vị toàn cầu để có được vị trí chính xác. Kính tiềm vọng -một ống có thể thu vào với hệ thống lăng kính cung cấp khả năng quan sát bề mặt-đôi khi chỉ được sử dụng trong các tàu ngầm hiện đại, vì phạm vi tầm nhìn ngắn. Tàu ngầm lớp Virginia và lớp Astute sử dụng cột quang tử hơn là kính tiềm vọng quang học xuyên qua thân tàu. Những kết cấu tháp chỉ huy này vẫn phải được triển khai trên bề mặt và sử dụng các cảm biến điện tử để phát hiện ánh sáng nhìn thấy được, hồng ngoại, đo khoảng cách bằng laser và giám sát điện từ. Một lợi ích của việc nâng cột lên trên mặt nước là trong khi cột ở trên mặt nước thì toàn bộ tàu ngầm vẫn ở dưới mặt nước và khó phát hiện bằng mắt thường hoặc bằng radar hơn nhiều.
Tàu ngầm quân sự sử dụng một số hệ thống để liên lạc với các trung tâm chỉ huy ở xa hoặc với các tàu khác. Một là trạm phát VLF (tần số rất thấp), có thể tiếp cận tàu ngầm trên mặt nước hoặc dưới ngầm ở độ sâu khá nông, thường nhỏ hơn 50 m. ELF (tần số cực thấp) có thể tiếp cận tàu ngầm ở độ sâu lớn hơn, nhưng có băng thông rất thấp và thường được sử dụng để gọi tàu ngầm đang lặn ở độ sâu nông hơn nơi tín hiệu VLF có thể tiếp cận. Một chiếc tàu ngầm cũng có tùy chọn thả nổi một ăng-ten dây dài, nổi ở độ sâu nông hơn, hay trên mặt nước cho phép truyền VLF bằng một chiếc thuyền chìm sâu.
Bằng cách mở rộng cột vô tuyến, tàu ngầm cũng có thể sử dụng kỹ thuật “burst transmission” (truyền dữ liệu nén trong thời gian ngắn sử dụng băng thống rộng). Việc truyền dạng này chỉ mất một phần giây, giảm thiểu nguy cơ bị phát hiện của tàu ngầm.
Để liên lạc với các tàu ngầm khác, một hệ thống được gọi là Gertrude được sử dụng. Gertrude về cơ bản là một điện thoại sonar. Thông tin liên lạc bằng giọng nói từ một tàu ngầm được truyền bằng loa công suất thấp xuống nước, nơi nó được phát hiện bởi sonar thụ động trên tàu ngầm nhận. Phạm vi hoạt động của hệ thống này có lẽ rất ngắn và khi sử dụng nó sẽ phát ra âm thanh vào trong nước khiến kẻ thù có thể nghe thấy.
Các tàu ngầm dân sự có thể sử dụng các hệ thống tương tự, mặc dù kém mạnh mẽ hơn để liên lạc với các tàu hỗ trợ hoặc các tàu lặn khác trong khu vực.
Hệ thống hỗ trợ sinh hoạt
Với năng lượng hạt nhân hoặc động cơ đẩy không khí độc lập, tàu ngầm có thể lặn dưới nước trong nhiều tháng liền. Các tàu ngầm diesel thông thường phải nổi lên định kỳ hoặc chạy bằng ống ống hút khí để nạp lại ắc-quy và thông khí trong tàu với môi trường ngoài. Hầu hết các tàu ngầm quân sự hiện đại tạo ra oxy thở bằng cách điện phân nước ngọt (sử dụng một thiết bị gọi là “Máy tạo oxy điện phân” (Electrolytic Oxygen Generator)). Oxy khẩn cấp có thể được tạo ra bằng cách đốt nến natri clorat. Thiết bị kiểm soát bầu không khí bao gồm máy lọc Carbon dioxide, sử dụng một bình xịt monoethanolamine (MEA) chất hấp thụ để tạo ra oxy, sau đó MEA được đun nóng trong nồi hơi để giải phóng CO2 sau đó được bơm lên tàu. Việc tẩy rửa khẩn cấp cũng có thể được thực hiện bằng lithium hydroxit, là chất tiêu hao. Máy sử dụng chất xúc tác để chuyển đổi carbon monoxide thành carbon dioxide (được loại bỏ bằng máy lọc CO2) và liên kết hydro được tạo ra từ pin dự trữ của tàu với oxy trong khí quyển để tạo ra nước, cũng được sử dụng. Một hệ thống giám sát khí thở lấy mẫu không khí từ các khu vực khác nhau trên tàu để xác định thành phần nitơ, oxy, hydro, R-12 và chất làm lạnh R-114, carbon dioxide, carbon monoxide và các loại khí khác. Khí độc được loại bỏ và oxy được bổ sung bằng cách sử dụng oxy dự trữ nằm trong các chai khí. Một số tàu ngầm nặng hơn có hai trạm xả oxy (phía trước và phía sau). Oxy trong không khí đôi khi được giữ ít hơn vài phần trăm so với nồng độ trong khí quyển để giảm nguy cơ hỏa hoạn.
Nước ngọt được sản xuất bởi thiết bị bay hơi hoặc thiết bị thẩm thấu ngược. Việc sử dụng chính đối với nước ngọt là cung cấp nước cấp cho lò phản ứng và các nhà máy đẩy hơi nước. Nó cũng có sẵn cho vòi hoa sen, bồn rửa, nấu ăn và làm sạch sau khi nhu cầu của nhà máy đẩy đã được đáp ứng. Nước biển được sử dụng để xả nhà vệ sinh và nước thải được chứa trong két nước bẩn cho đến khi nó được thổi ra ngoài bằng khí trung áp áp hoặc được bơm ra khỏi tàu bằng máy bơm chuyên dụng. Hệ thống xả nước bẩn đòi hỏi phải có kỹ năng vận hành và các van cách ly phải được đóng trước khi xả (chống đẩy ngược lại vào trong tàu). Tàu Type VIIC U-1206 của Đức đã bị mất tích với thương vong do lỗi của con người khi sử dụng hệ thống này. Nước từ vòi hoa sen và bồn rửa được lưu trữ riêng trong két nước thải và thải ra ngoài bằng cách tương tự.
Rác trên các tàu ngầm lớn hiện đại thường được xử lý bằng cách sử dụng một thiết bị dạng ống gọi là Bộ xử lý rác TDU (Trash Disposal Unit), nơi rác được nén vào một thùng thép mạ kẽm. Ở dưới cùng của TDU là một van bi lớn. Một nút bịt đá được đặt trên đầu van bi để bảo vệ nó, các hộp nằm trên nút bịt đá. Cửa sập trên cùng được đóng lại, TDU ngập nước ngoài mạn và cân bằng với áp suất bên ngoài, van bi được mở và các lon rơi ra ngoài với sự hỗ trợ của các trọng lượng sắt vụn trong lon hoặc được hỗ trợ bằng khí áp. TDU cũng được xả bằng nước biển để đảm bảo nó hoàn toàn trống rỗng và van bi thông thoáng trước khi đóng van.
Thủy thủ đoàn
Một tàu ngầm hạt nhân điển hình có thủy thủ đoàn hơn 80 người; tàu thông thường thường có ít hơn 40 người. Điều kiện trên tàu ngầm có thể khó khăn vì các thành viên thủy thủ đoàn phải làm việc cách ly trong thời gian dài, không có liên lạc với gia đình và trong điều kiện chật chội. Tàu ngầm thường duy trì sự im lặng vô tuyến để tránh bị phát hiện. Vận hành tàu ngầm rất nguy hiểm, ngay cả trong thời bình và nhiều tàu ngầm đã bị mất tích do tai nạn.
Phụ nữ
Hầu hết các lực lượng hải quân đều cấm phụ nữ phục vụ trên tàu ngầm, ngay cả sau khi họ được phép phục vụ trên tàu chiến mặt nước. Hải quân Hoàng gia Na Uy trở thành lực lượng hải quân đầu tiên cho phép phụ nữ tham gia thủy thủ đoàn tàu ngầm vào năm 1985. Hải quân Hoàng gia Đan Mạch cho phép nữ thủy thủ tàu ngầm vào năm 1988. Các quốc gia khác cũng làm theo như Hải quân Thụy Điển (1989), Hải quân Hoàng gia Úc (1998), Hải quân Tây Ban Nha (1999), Hải quân Đức (2001) và Hải quân Canada (2002). Năm 1995, Solveig Krey của Hải quân Hoàng gia Na Uy trở thành nữ sĩ quan đầu tiên nắm quyền chỉ huy trên một tàu ngầm quân sự, HNoMS Kobben.
Vào ngày 8/12/2011, Bộ trưởng Quốc phòng Anh Philip Hammond thông báo rằng lệnh cấm phụ nữ đi tàu ngầm của Vương quốc Anh sẽ được dỡ bỏ từ năm 2013. Trước đây đã có những lo ngại rằng phụ nữ gặp nhiều rủi ro hơn do tích tụ khí carbon dioxide trong tàu ngầm. Nhưng một nghiên cứu cho thấy không có lý do y tế nào để loại trừ phụ nữ, mặc dù phụ nữ mang thai vẫn sẽ bị loại trừ. Những mối nguy hiểm tương tự đối với phụ nữ mang thai và thai nhi đã cấm phụ nữ tham gia nghĩa vụ tàu ngầm ở Thụy Điển vào năm 1983, khi tất cả các vị trí khác đều dành cho họ trong Hải quân Thụy Điển. Ngày nay, phụ nữ mang thai vẫn không được phép phục vụ trên tàu ngầm ở Thụy Điển. Tuy nhiên, các nhà hoạch định chính sách cho rằng đó là sự phân biệt đối xử với lệnh cấm chung và yêu cầu phụ nữ phải được xem xét dựa trên thành tích cá nhân của họ và được đánh giá mức độ phù hợp cũng như so sánh với các ứng cử viên khác. Hơn nữa, họ lưu ý rằng một người phụ nữ tuân theo những yêu cầu cao như vậy khó có thể mang thai. Vào tháng 5/2014, 3 phụ nữ đã trở thành nữ thủy thủ tàu ngầm đầu tiên của Hải quân Hoàng gia.
Phụ nữ đã phục vụ trên các tàu mặt nước của Hải quân Hoa Kỳ từ năm 1993 và kể từ năm 2011-2012, lần đầu tiên họ bắt đầu phục vụ trên tàu ngầm. Cho đến thời điểm hiện tại, Hải quân chỉ cho phép ba trường hợp ngoại lệ đối với phụ nữ trên tàu ngầm quân sự: nữ kỹ thuật viên dân sự tối đa là vài ngày, nữ trung sĩ qua đêm trong khóa huấn luyện mùa hè cho Hải quân ROTC (quân đoàn huấn luyện dự bị), Học viện Hải quân, và các thành viên gia đình cho một ngày phụ thuộc hành trình trên biển. Năm 2009, các quan chức cấp cao, bao gồm Bộ trưởng Hải quân lúc bấy giờ Ray Mabus, Tham mưu trưởng Liên quân Đô đốc Michael Mullen và Giám đốc Tác chiến Hải quân Đô đốc Gary Roughead, bắt đầu quá trình tìm cách cho phép phụ nữ trên tàu ngầm. Hải quân Hoa Kỳ đã hủy bỏ chính sách “không có phụ nữ trên tàu ngầm” vào năm 2010.
Cả hải quân Hoa Kỳ và Anh đều vận hành các tàu ngầm chạy bằng năng lượng hạt nhân triển khai trong thời gian 6 tháng hoặc lâu hơn. Các lực lượng hải quân khác cho phép phụ nữ phục vụ trên tàu ngầm vận hành các tàu ngầm chạy bằng năng lượng thông thường, được triển khai trong thời gian ngắn hơn nhiều – thường chỉ trong vài tháng. Trước sự thay đổi của Mỹ, không quốc gia nào sử dụng tàu ngầm hạt nhân cho phép phụ nữ phục vụ trên tàu.
Năm 2011, lớp sĩ quan tàu ngầm nữ đầu tiên đã tốt nghiệp Khóa học Cơ bản về Sĩ quan Tàu ngầm của Trường Tàu ngầm Hải quân (SOBC) tại Căn cứ Tàu ngầm Hải quân New London. Ngoài ra, các nữ sĩ quan cấp cao hơn và có kinh nghiệm tiếp tế từ chuyên ngành tác chiến mặt nước cũng đã tham dự SOBC, tiến tới các tàu ngầm tên lửa đạn đạo (SSBN) và tên lửa dẫn đường (SSGN) cùng với các nữ sĩ quan khóa tàu ngầm mới bắt đầu từ cuối năm 2011. Năm 2011, một số phụ nữ được bổ nhiệm vào tàu ngầm tên lửa đạn đạo lớp Ohio USS Wyoming. Vào ngày 15/10/2013, Hải quân Hoa Kỳ thông báo rằng hai trong số các tàu ngầm tấn công lớp Virginia nhỏ hơn, USS Virginia và USS Minnesota, sẽ có thành viên thủy thủ đoàn là nữ vào tháng 1/2015.
Năm 2020, học viện tàu ngầm hải quân quốc gia Nhật Bản đã tiếp nhận ứng viên nữ đầu tiên. Phụ nữ như thông dịch viên, khách thăm vẫn có thể lên tàu hay dự cơm trong phòng ăn của tàu.
Tàu ngầm Nga và Việt Nam vẫn không cho phép phụ nữ đặt chân lên boong tàu ngầm, mặc dù có rất nhiều thợ thủ công là nữ đã tham gia quá trình đóng tàu tại nhà máy.
Thoát hiểm
Trong trường hợp khẩn cấp, tàu ngầm có thể truyền tín hiệu cho các tàu khác. Thủy thủ đoàn có thể sử dụng các bộ thoát hiểm như Thiết bị lặn thoát hiểm dưới nước để rời khỏi tàu ngầm thông qua một khoang thoát hiểm, là một ngăn khóa khí nhỏ cung cấp lộ trình cho thủy thủ đoàn thoát khỏi tàu ngầm bị nạn ở áp suất xung quanh theo nhóm nhỏ, đồng thời giảm thiểu lượng nước tiếp nhận vào tàu ngầm. Phi hành đoàn có thể tránh chấn thương phổi do không khí trong phổi giãn nở quá mức do thay đổi áp suất được gọi là chấn thương khí áp phổi bằng cách duy trì đường thở thông thoáng và thở ra trong quá trình nổi lên. Sau khi thoát khỏi tàu ngầm điều áp, trong đó áp suất không khí cao hơn khí quyển do nước xâm nhập hoặc các lý do khác, thủy thủ đoàn có nguy cơ mắc bệnh giảm áp suất khi quay trở lại áp suất bề mặt.
Một cách thoát hiểm thay thế khác là thông qua một phương tiện cứu nạn lặn sâu có thể kết nối với tàu ngầm bị nạn, thiết lập một vành kết nối xung quanh cửa thoát hiểm và chuyển ra nhân viên ở áp suất tương đương như bên trong tàu ngầm. Nếu tàu ngầm đã được điều áp, những người sống sót có thể được đưa vào buồng giảm áp trên tàu cứu nạn tàu ngầm để điều trị giảm áp đến điều kiện tiêu chuẩn của khí quyển./.
Xem thêm: LỊCH SỬ TÀU NGẦM




Xem thêm: LỊCH SỬ TÀU NGẦM


