
Điều hướng tàu ngầm dưới nước đòi hỏi những kỹ năng và công nghệ đặc biệt mà tàu mặt nước không cần. Những thách thức của việc điều hướng dưới nước trở nên quan trọng hơn khi tàu ngầm dành nhiều thời gian hơn dưới nước, di chuyển quãng đường xa hơn và ở tốc độ cao hơn. Tàu ngầm quân sự di chuyển dưới nước trong môi trường hoàn toàn tối tăm, không có cửa sổ cũng như không có đèn. Hoạt động ở chế độ tàng hình, chúng không thể sử dụng hệ thống sonar chủ động của mình để phát hiện các mối nguy hiểm dưới nước như núi dưới đáy biển, giàn khoan hoặc các tàu ngầm khác. Bề mặt để có được các bản sửa lỗi điều hướng bị loại trừ bởi sự phổ biến các hệ thống phát hiện tác chiến chống ngầm như radar và giám sát vệ tinh. Cột ăng-ten và kính tiềm vọng được trang bị ăng-ten có thể được nâng lên để thu tín hiệu điều hướng nhưng ở những khu vực bị giám sát chặt chẽ, chỉ trong vài giây hoặc vài phút; công nghệ radar hiện tại có thể phát hiện ngay cả một kính tiềm vọng mảnh mai trong khi bóng của tàu ngầm có thể nhìn thấy rõ ràng từ trên không.

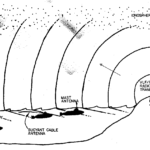
Một chiếc tàu ngầm ở độ sâu của kính tiềm vọng có nguy cơ bị phát hiện bằng hình ảnh hoặc radar.
Tàu ngầm có thể nâng nhiều cột ăng ten, cột radar và kính tiềm vọng để tạo điều kiện liên lạc và điều hướng.
Tàu ngầm nổi vào và rời cảng điều hướng tương tự như tàu truyền thống nhưng có thêm một số cân nhắc vì phần lớn tàu đi dưới mực nước, khiến các tàu khác khó nhìn thấy và xác định. Tàu ngầm mang hệ thống định vị quán tính, đo lường chuyển động của tàu và liên tục cập nhật vị trí. Bởi vì nó không dựa vào tín hiệu vô tuyến hoặc quan sát thiên thể, nó cho phép con tàu điều hướng trong khi vẫn ẩn dưới mặt nước. Để duy trì độ chính xác, tàu ngầm phải định kỳ cập nhật vị trí của nó bằng các tín hiệu vô tuyến điều hướng bên ngoài. Từ những năm 1960 đến những năm 1990, các vệ tinh Transit và trạm bờ LORAN đã cung cấp các tín hiệu đó. GPS hiện đã thay thế cả hai.
Điều hướng bề mặt và gần bề mặt
Trên bề mặt hoặc ở độ sâu kính tiềm vọng, tàu ngầm đã sử dụng các phương pháp sau để xác định vị trí của chúng:
– Định vị vệ tinh:
+ Hệ thống định vị toàn cầu (GPS) – bằng cách nhập điểm tham chiếu bên trong, có thể điều hướng ở mức độ chính xác hơn.
+ NAVSAT.
– Hệ thống định vị dựa trên vô tuyến mặt đất; phần lớn được thay thế bởi các hệ thống vệ tinh:
+ LORAN – Hệ thống định vị hypebol vô tuyến tần số thấp, không còn được sử dụng.
+ CHAYKA, bản sao tiếng Nga của LORAN.
+ OMEGA, hệ thống định vị hyperbol vô tuyến toàn cầu tần số rất thấp của phương Tây, không còn được sử dụng.
+ Alpha, đối tác Nga của Hệ thống định vị Omega.
– Điều hướng thiên thể bằng kính tiềm vọng hoặc kính lục phân – hiếm khi được sử dụng nữa do sự tiến bộ của công nghệ.
– Dẫn đường bằng radar; tín hiệu radar dễ bị phát hiện nên radar thường chỉ được sử dụng ở vùng biển thân thiện ra vào cảng. Với việc triển khai một hệ thống radar tiên tiến hơn, nhiều kỹ thuật mới đã được thực hiện trong quá trình này.
– Sonar chủ động; Giống như radar, các hệ thống sonar chủ động dễ dàng được phát hiện, vì vậy sonar chủ động thường chỉ được sử dụng khi ra vào các cảng.
– Hoa tiêu – ở ven biển và nội thủy, tàu ngầm nổi lên mặt nước dựa vào hệ thống hỗ trợ định hướng tiêu chuẩn (phao, cột mốc định hướng, ngọn hải đăng…), sử dụng kính tiềm vọng để có được các đường định vị nhằm vẽ sơ đồ cố định tam giác.
– Hệ thống Quản lý Hành trình VMS (Voyage Management System), sử dụng các biểu đồ kỹ thuật số với các nguồn bên ngoài khác được đưa vào, để thiết lập vị trí của con tàu. Các thông tin khác cũng có thể được nhập thủ công để thiết lập vị trí hoặc bản hiệu chỉnh chất lượng cao.
Điều hướng dưới ngầm
Ở độ sâu dưới độ sâu kính tiềm vọng, tàu ngầm xác định vị trí của chúng bằng cách sử dụng:
– Thông tin về hướng đi tính toán tuyệt đối (Dead reckoning) thu được từ la bàn con quay hồi chuyển của con tàu, tốc độ đo được và ước tính dòng hải lưu địa phương, đây cũng có thể được coi là vị trí ước tính miễn là dòng hải lưu được tính toán.
– Hệ thống điều hướng quán tính là một nguồn vị trí ước tính, sử dụng khả năng tăng tốc, giảm tốc và cao độ và lăn để tính toán.
– Điều hướng đường đẳng sâu có thể được sử dụng ở những khu vực có dữ liệu thủy văn chi tiết đã được lập biểu đồ và có sự thay đổi thích hợp về địa hình đáy biển. Các phép đo độ sâu của máy đo độ sâu được so sánh với các mẫu độ sâu được lập biểu đồ./.