Âm học dưới nước (Underwater acoustics) hoặc thủy âm học (hydroacoustics) là nghiên cứu về sự lan truyền âm thanh trong nước và sự tương tác của các sóng cơ học tạo thành âm thanh với nước, nội dung và ranh giới của nó. Nước có thể ở trong đại dương, hồ, sông hoặc bể chứa. Các tần số điển hình liên quan đến âm học dưới nước nằm trong khoảng từ 10 Hz đến 1 MHz. Việc truyền âm thanh trong đại dương ở tần số thấp hơn 10 Hz thường không thể thực hiện được nếu không thâm nhập sâu vào đáy biển, trong khi tần số trên 1 MHz hiếm khi được sử dụng vì chúng được hấp thụ rất nhanh.
Thủy âm, sử dụng công nghệ sonar, được sử dụng phổ biến nhất để theo dõi các đặc điểm vật lý và sinh học dưới nước. Hydroacoustics có thể được sử dụng để phát hiện độ sâu của một vùng nước (độ sâu), cũng như sự hiện diện hay vắng mặt, sự phong phú, phân bố, kích thước và hành vi của thực vật và động vật dưới nước. Cảm biến thủy âm liên quan đến “âm học thụ động” (lắng nghe âm thanh) hoặc âm học chủ động tạo ra âm thanh và lắng nghe tiếng vang, do đó có tên gọi chung cho thiết bị, máy đo tiếng vọng (echo sounder hoặc echosounder).
Có một số nguyên nhân khác nhau gây ra tiếng ồn từ chuyển động. Chúng có thể được chia thành nguyên nhân do chân vịt gây ra, nguyên nhân do máy móc gây ra và nguyên nhân do chuyển động của thân tàu trong nước. Tầm quan trọng tương đối của ba loại khác nhau này sẽ phụ thuộc, những thứ khác nhau, tùy thuộc vào loại tàu.
Một trong những nguyên nhân chính gây ra tiếng ồn thủy âm từ các bề mặt nâng chìm hoàn toàn là dòng chảy hỗn loạn tách biệt không ổn định gần mép sau của bề mặt tạo ra dao động áp suất trên bề mặt và dòng chảy dao động không ổn định ở phần gần. Chuyển động tương đối giữa bề mặt và đại dương tạo ra một lớp ranh giới hỗn loạn TBL (turbulent boundary layer) bao quanh bề mặt. Tiếng ồn được tạo ra bởi các trường vận tốc và áp suất dao động trong TBL này.
Lĩnh vực âm học dưới nước có liên quan chặt chẽ với một số lĩnh vực nghiên cứu âm học khác, bao gồm sonar, truyền dẫn, xử lý tín hiệu, hải dương học âm thanh, âm sinh học và âm học vật lý.
Lịch sử
Âm thanh dưới nước có lẽ đã được các động vật biển sử dụng hàng triệu năm. Khoa học về âm thanh dưới nước bắt đầu vào năm 1490, khi Leonardo da Vinci viết: “Nếu bạn cho tàu của mình dừng lại và đặt đầu của một ống dài xuống nước và áp đầu ngoài vào tai, bạn sẽ nghe thấy tiếng tàu ở một khoảng cách rất xa”.
Năm 1687, Isaac Newton đã viết Nguyên tắc Toán học của Triết học Tự nhiên, trong đó bao gồm cách xử lý toán học đầu tiên của âm thanh. Bước quan trọng tiếp theo trong sự phát triển của âm học dưới nước được thực hiện bởi Daniel Colladon, một nhà vật lý người Thụy Sĩ, và Charles Sturm, một nhà toán học người Pháp. Vào năm 1826, trên hồ Geneva, họ đã đo thời gian trôi qua giữa một tia sáng và tiếng chuông của một con tàu chìm dưới nước được nghe bằng một chiếc còi dưới nước. Họ đã đo được tốc độ âm thanh là 1435 m/s trên khoảng cách 17 km, cung cấp phép đo định lượng đầu tiên về tốc độ âm thanh trong nước. Kết quả họ thu được nằm trong khoảng 2% giá trị được chấp nhận hiện nay. Năm 1877, Lord Rayleigh đã viết Lý thuyết về âm thanh và thiết lập lý thuyết âm thanh hiện đại.
Vụ đắm tàu Titanic vào năm 1912 và sự bùng nổ của Thế chiến I đã tạo động lực cho làn sóng tiến bộ tiếp theo trong lĩnh vực âm học dưới nước. Các hệ thống phát hiện tảng băng trôi và U-boat đã được phát triển. Từ năm 1912 đến năm 1914, một số bằng sáng chế về định vị bằng tiếng vang đã được cấp ở Châu Âu và Hoa Kỳ, đỉnh cao là máy đo tiếng vang của Reginald A. Fessenden vào năm 1914. Công việc tiên phong được thực hiện trong thời gian này ở Pháp bởi Paul Langevin và ở Anh bởi AB Gỗ và cộng sự. Sự phát triển của cả sonar ASDIC chủ động và thụ động (Sound Navigation And Ranging) đã tiến hành nhanh chóng trong chiến tranh, được thúc đẩy bởi việc triển khai tàu ngầm quy mô lớn đầu tiên. Những tiến bộ khác trong âm học dưới nước bao gồm sự phát triển của các mìn âm thanh.
Năm 1919, bài báo khoa học đầu tiên về âm học dưới nước được xuất bản, mô tả về mặt lý thuyết sự khúc xạ của sóng âm thanh được tạo ra bởi chênh lệch nhiệt độ và độ mặn trong đại dương. Các dự đoán phạm vi của bài báo đã được xác thực bằng thực nghiệm bằng các phép đo tổn thất lan truyền.
Hai thập kỷ tiếp theo chứng kiến sự phát triển của một số ứng dụng âm học dưới nước. Máy đo độ sâu fathometer hay depth sounder, được phát triển thương mại trong những năm 1920. Các vật liệu tự nhiên ban đầu được sử dụng cho các bộ chuyển đổi, nhưng đến những năm 1930, các hệ thống sonar kết hợp các bộ chuyển đổi áp điện làm từ vật liệu tổng hợp đã được sử dụng cho các hệ thống nghe thụ động và cho các hệ thống đo tiếng vang chủ động. Các hệ thống này đã được sử dụng hiệu quả trong Thế chiến II bởi cả tàu ngầm và tàu chống ngầm. Nhiều tiến bộ trong âm học dưới nước đã được thực hiện và được tóm tắt sau đó trong loạt sách Vật lý âm thanh trên biển, xuất bản năm 1946.
Sau Thế chiến II, sự phát triển của các hệ thống sonar chủ yếu được thúc đẩy bởi Chiến tranh Lạnh, dẫn đến những tiến bộ trong hiểu biết lý thuyết và thực tế về âm học dưới nước, được hỗ trợ bởi các kỹ thuật dựa trên máy tính.
Lý thuyết
Sóng âm trong nước, đáy biển
Sóng âm thanh lan truyền dưới nước bao gồm các lực nén xen kẽ và các thành phần hiếm của nước. Những lực nén và sự hiếm gặp này được phát hiện bởi một máy thu, chẳng hạn như tai người hoặc ống nghe dưới nước, khi thay đổi áp suất. Những sóng này có thể do con người tạo ra hoặc được tạo ra một cách tự nhiên.
Tốc độ âm thanh, mật độ và trở kháng
Tốc độ của âm thanh c (nghĩa là chuyển động dọc của mặt sóng) có liên quan đến tần số f và bước sóng l của sóng ngang:
c = f.l
Điều này khác với vận tốc u đề cập đến chuyển động của các phân tử trong môi trường do âm thanh và liên quan đến áp suất sóng phẳng p đối với mật độ chất lỏng r và tốc độ âm thanh c:
p = c.u.r.
Kết quả của c và r từ công thức trên được gọi là trở kháng âm đặc trưng. Công suất âm thanh (năng lượng trên giây) đi qua đơn vị diện tích được gọi là cường độ của sóng và đối với sóng phẳng, cường độ trung bình được cho bởi
I = q2/(rc)
Trong đó: q là áp suất âm bình phương trung bình gốc rms (root mean square).
Ở 1 kHz, bước sóng trong nước là khoảng 1,5 m. Đôi khi thuật ngữ “vận tốc âm thanh” được sử dụng nhưng điều này không chính xác vì đại lượng là một đại lượng vô hướng.
Độ tương phản trở kháng lớn giữa không khí và nước (tỷ lệ khoảng 3600) và thang độ nhám bề mặt có nghĩa là mặt biển hoạt động như một vật phản xạ âm thanh gần như hoàn hảo ở tần số dưới 1 kHz. Tốc độ âm thanh trong nước vượt quá tốc độ âm thanh trong không khí theo hệ số 4,4 và tỷ lệ mật độ là khoảng 820.
Hấp thụ âm thanh
Khả năng hấp thụ âm thanh tần số thấp yếu. Nguyên nhân chính của sự suy giảm âm thanh trong nước ngọt và ở tần số cao trong nước biển (trên 100 kHz) là độ nhớt. Đóng góp bổ sung quan trọng ở tần số thấp hơn trong nước biển có liên quan đến sự thư giãn ion của axit boric (lên đến khoảng 10 kHz) và magie sulfat (khoảng 10 kHz-100 kHz).
Âm thanh có thể bị hấp thụ bởi sự mất mát ở ranh giới chất lỏng. Gần bề mặt của biển, tổn thất có thể xảy ra trong lớp bong bóng hoặc trong băng, trong khi ở dưới đáy âm thanh có thể xâm nhập vào trầm tích và được hấp thụ.
Phản xạ và tán xạ âm thanh
Tương tác ranh giới
Cả mặt và đáy nước đều có ranh giới phản xạ và tán xạ.
Bề mặt
Đối với nhiều mục đích, bề mặt không khí biển có thể được coi là một gương phản chiếu hoàn hảo. Độ tương phản trở kháng lớn đến mức rất ít năng lượng có thể vượt qua ranh giới này. Sóng áp suất âm thanh phản xạ từ mặt biển trải qua sự đảo ngược pha, thường được gọi là “sự thay đổi pha pi” hoặc “sự thay đổi pha 180 độ”. Điều này được thể hiện bằng toán học bằng cách gán hệ số phản xạ âm 1 thay vì cộng 1 cho mặt biển.
Ở tần số cao (trên khoảng 1 kHz) hoặc khi biển động, một số âm thanh tới bị phân tán và điều này được tính đến bằng cách gán một hệ số phản xạ có cường độ nhỏ hơn một. Ví dụ, gần với tần suất bình thường, hệ số phản xạ trở thành
R=-ex
Trong đó: x = -2k2.h2.sin2A
h là chiều cao sóng rms
Một điều phức tạp hơn nữa là sự hiện diện của bong bóng hoặc cá do gió tạo ra ở gần mặt biển. Các bong bóng cũng có thể tạo thành các chùm hấp thụ một số âm thanh tới và phân tán, đồng thời tự phân tán một số âm thanh.
Đáy biển
Trở kháng âm thanh không phù hợp giữa nước và đáy nói chung ít hơn nhiều so với trên bề mặt và phức tạp hơn. Nó phụ thuộc vào loại chất đáy và độ sâu của các lớp. Các lý thuyết đã được phát triển để dự đoán sự truyền âm ở đáy trong trường hợp này, chẳng hạn như của Biot và Buckingham.
Tại mục tiêu
Sự phản xạ của âm thanh tại mục tiêu có kích thước lớn so với bước sóng âm thanh phụ thuộc vào kích thước và hình dạng của nó cũng như trở kháng của mục tiêu so với nước. Các công thức đã được phát triển cho cường độ mục tiêu của các hình dạng đơn giản khác nhau như là một hàm của góc tới âm thanh. Các hình phức tạp hơn có thể được tính gần đúng bằng cách kết hợp các hình đơn giản này.
Sự lan truyền âm thanh
Sự lan truyền âm thanh dưới nước phụ thuộc vào nhiều yếu tố. Hướng truyền âm thanh được xác định bởi độ dốc tốc độ âm thanh trong nước. Các gradient tốc độ này biến đổi sóng âm thanh thông qua khúc xạ, phản xạ và phân tán. Ở biển, độ dốc dọc thường lớn hơn nhiều so với độ dốc ngang. Kết hợp điều này với xu hướng tăng tốc độ âm thanh ở độ sâu ngày càng tăng, do áp suất ngày càng tăng ở biển sâu, gây ra sự đảo ngược độ dốc tốc độ âm thanh trong đường nhiệt độ, tạo ra một ống dẫn sóng hiệu quả ở độ sâu, tương ứng với tốc độ âm thanh tối thiểu. Cấu hình tốc độ âm thanh có thể gây ra các vùng có cường độ âm thanh thấp được gọi là “Vùng bóng” và các vùng có cường độ cao được gọi là “Caustics”. Chúng có thể được tìm thấy bằng phương pháp dò tia.
Ở vĩ độ xích đạo và ôn đới trong đại dương, nhiệt độ bề mặt đủ cao để đảo ngược hiệu ứng áp suất, sao cho tốc độ âm thanh tối thiểu xảy ra ở độ sâu vài trăm mét. Sự hiện diện của mức tối thiểu này tạo ra một kênh đặc biệt được gọi là kênh âm thanh sâu hoặc kênh SOFAR (cố định âm thanh và phạm vi), cho phép truyền âm thanh dưới nước có dẫn hướng trong hàng nghìn km không có tương tác với mặt biển hoặc đáy biển. Một hiện tượng khác ở biển sâu là sự hình thành các vùng tập trung âm thanh, được gọi là vùng hội tụ. Trong trường hợp này, âm thanh bị khúc xạ xuống từ một nguồn gần bề mặt và sau đó quay ngược trở lại. Khoảng cách theo chiều ngang từ nguồn mà tại đó điều này xảy ra phụ thuộc vào gradien tốc độ âm và dương. Một ống dẫn bề mặt cũng có thể xảy ra ở cả vùng nước sâu và nông vừa phải khi có khúc xạ hướng lên, ví dụ như do nhiệt độ bề mặt lạnh. Sự lan truyền là do âm thanh lặp đi lặp lại dội ra khỏi bề mặt.
Nói chung, khi âm thanh lan truyền dưới nước, cường độ âm thanh sẽ giảm theo các phạm vi tăng dần, mặc dù trong một số trường hợp, có thể đạt được mức tăng do hội tụ. Suy hao lan truyền (đôi khi được gọi là suy hao truyền dẫn) là một phép đo định lượng về sự suy giảm cường độ âm thanh giữa hai điểm, thông thường là nguồn âm thanh và máy thu ở xa. Nếu như Islà cường độ trường xa của nguồn được gọi là điểm cách tâm âm của nó 1 m và Ir là cường độ tại máy thu, sau đó suy hao lan truyền được cho bởi:
PL = 10log(Is/Ir)
Trong phương trình này: Ir không phải là cường độ âm thanh thực tại máy thu, là một đại lượng vectơ, mà là một đại lượng vô hướng bằng với cường độ sóng phẳng tương đương EPWI (equivalent plane wave intensity) của trường âm thanh. EPWI được định nghĩa là cường độ của sóng phẳng có cùng áp suất RMS như trường âm thực. Ở cự ly ngắn, suy hao lan truyền bị chi phối bởi sự lan truyền trong khi ở cự ly xa, nó bị chi phối bởi suy hao hấp thụ và/hoặc tán xạ.
Có thể có một định nghĩa thay thế về áp suất thay vì cường độ, với:
PL = 20log(ps/pr)
Trong đó, ps là áp suất âm thanh rms trong trường xa của máy chiếu, được chia tỷ lệ theo khoảng cách tiêu chuẩn là 1 m và pr là áp suất rms tại vị trí máy thu.
Hai định nghĩa này không hoàn toàn tương đương vì trở kháng đặc trưng ở máy thu có thể khác với trở kháng ở nguồn. Do đó, việc sử dụng định nghĩa cường độ dẫn đến một phương trình sonar khác với định nghĩa dựa trên tỷ lệ áp suất. Nếu nguồn và máy thu đều ở trong nước, sự khác biệt là nhỏ.
Mô hình lan truyền
Sự truyền âm trong nước được mô tả bằng phương trình sóng với các điều kiện biên thích hợp. Một số mô hình đã được phát triển để đơn giản hóa các tính toán lan truyền. Các mô hình này bao gồm lý thuyết tia, các giải pháp chế độ bình thường và đơn giản hóa phương trình parabol của phương trình sóng. Mỗi tập hợp các giải pháp nói chung là hợp lệ và hiệu quả về mặt tính toán trong chế độ tần số và phạm vi giới hạn và cũng có thể liên quan đến các giới hạn khác. Lý thuyết tia thích hợp hơn ở cự ly ngắn và tần số cao, trong khi các giải pháp khác hoạt động tốt hơn ở cự ly dài và tần số thấp. Các công thức thực nghiệm và phân tích khác nhau cũng đã được bắt nguồn từ các phép đo gần đúng hữu ích.
Âm vang
Âm thanh nhất thời dẫn đến nền suy giảm có thể có thời lượng lớn hơn nhiều so với tín hiệu nhất thời ban đầu. Nguyên nhân của nền này, được gọi là âm vang, một phần là do sự tán xạ từ các ranh giới gồ ghề và một phần do sự tán xạ từ cá và các quần thể sinh vật khác. Để tín hiệu âm thanh được phát hiện dễ dàng, tín hiệu đó phải vượt quá mức âm vang cũng như mức tiếng ồn xung quanh.
Dịch chuyển Doppler
Nếu một vật thể dưới nước đang chuyển động so với máy thu dưới nước, thì tần số của âm thanh nhận được sẽ khác với tần số của âm thanh do vật thể đó phát ra (hoặc phản xạ). Sự thay đổi tần số này được gọi là dịch chuyển Doppler. Có thể dễ dàng quan sát thấy sự dịch chuyển trong các hệ thống sonar chủ động, đặc biệt là các hệ thống băng tần hẹp, vì tần số máy phát đã biết và có thể tính toán được chuyển động tương đối giữa sonar và đối tượng. Đôi khi tần số của tiếng ồn bức xạ (âm sắc) cũng có thể được biết đến, trong trường hợp đó, phép tính tương tự có thể được thực hiện đối với sonar thụ động. Đối với các hệ thống đang hoạt động, sự thay đổi tần số là 0,69 Hz mỗi nútmỗi kHz và một nửa số này đối với các hệ thống thụ động vì việc truyền bá chỉ là một chiều. Sự thay đổi tương ứng với sự gia tăng tần số cho một mục tiêu đang đến gần.
Cường độ dao động
Mặc dù mô hình lan truyền âm thanh thường dự đoán mức âm thanh nhận được không đổi, nhưng trong thực tế có cả dao động không gian và thời gian. Đây có thể là do cả hiện tượng môi trường quy mô nhỏ và quy mô lớn. Chúng có thể bao gồm cấu trúc tinh vi của cấu hình tốc độ âm thanh và các vùng phía trước cũng như các sóng bên trong. Bởi vì nói chung có nhiều đường truyền giữa nguồn và máy thu, những thay đổi pha nhỏ trong dạng giao thoa giữa các đường này có thể dẫn đến những dao động lớn về cường độ âm thanh.
Phi tuyến tính
Trong nước, đặc biệt là với bọt khí, sự thay đổi mật độ do thay đổi áp suất không tỷ lệ tuyến tính chính xác. Kết quả là đối với đầu vào sóng hình sin, các tần số hài và phụ được tạo ra. Khi hai sóng hình sin được đưa vào, tần số tổng và hiệu được tạo ra. Quá trình chuyển đổi lớn hơn ở cấp độ nguồn cao so với cấp độ nguồn nhỏ. Do tính phi tuyến tính, có sự phụ thuộc của tốc độ âm thanh vào biên độ áp suất nên những thay đổi lớn di chuyển nhanh hơn những thay đổi nhỏ. Do đó, dạng sóng hình sin dần dần trở thành dạng răng cưa với độ dốc tăng dần và đuôi giảm dần. Sử dụng hiện tượng này trong sonar tham số và các lý thuyết đã được phát triển để giải thích cho điều này, ví dụ như bởi Westerfield.
Đo đạc
Âm thanh trong nước được đo bằng ống nghe dưới nước (hydrophone), tương đương với micrô dưới nước (microphone). Một ống nghe dưới nước đo dao động áp suất và chúng thường được chuyển đổi thành mức áp suất âm thanh SPL (sound pressure level), là thước đo logarit của áp suất âm bình phương trung bình.
Các phép đo thường được báo cáo ở một trong hai dạng:
– áp suất âm thanh rms tính bằng pascal (hoặc mức áp suất âm thanh (SPL) tính bằng dB re 1 μPa).
– mật độ phổ (áp suất bình phương trung bình trên một đơn vị băng thông) tính bằng pascal bình phương trên hertz (dB re 1 μPa2 /Hz).
Thang đo áp suất âm thanh trong nước khác với thang đo được sử dụng cho âm thanh trong không khí. Trong không khí, áp suất tham chiếu là 20 μPa thay vì 1 μPa. Với cùng một giá trị số của SPL, cường độ của sóng phẳng (công suất trên một đơn vị diện tích, tỷ lệ với áp suất âm bình phương trung bình chia cho trở kháng âm) trong không khí cao hơn khoảng 20 2 × 3600 = 1 440 000 lần so với trong nước. Tương tự, cường độ gần như giống nhau nếu SPL cao hơn 61,6 dB trong nước.
Tiêu chuẩn ISO 18405 năm 2017 xác định các thuật ngữ và cách diễn đạt được sử dụng trong lĩnh vực âm học dưới nước, bao gồm cả việc tính toán mức áp suất âm thanh dưới nước.
Tốc độ âm thanh
Các giá trị gần đúng đối với nước ngọt và nước biển, tương ứng, ở áp suất khí quyển là 1450 và 1500 m/s đối với tốc độ âm thanh, và 1000 và 1030 kg/m3 đối với mật độ. Tốc độ âm thanh trong nước tăng lên khi áp suất, nhiệt độ và độ mặn tăng lên. Tốc độ tối đa trong nước tinh khiết dưới áp suất khí quyển đạt được ở khoảng 74 °C; âm thanh truyền chậm hơn trong nước nóng hơn sau thời điểm đó; tối đa tăng theo áp suất.
Hấp thụ
Nhiều phép đo đã được thực hiện về sự hấp thụ âm thanh trong hồ và đại dương.
Tiếng ồn xung quanh (tạp âm)
Có thể đo tín hiệu âm thanh nếu biên độ của chúng vượt quá ngưỡng tối thiểu, được xác định một phần bởi quá trình xử lý tín hiệu được sử dụng và một phần bởi mức nhiễu nền. Tiếng ồn xung quanh là một phần của tiếng ồn nhận được độc lập với các đặc tính của nguồn, máy thu và nền tảng. Do đó, nó loại trừ tiếng vang và tiếng ồn kéo chẳng hạn.
Tiếng ồn nền có trong đại dương, hay tiếng ồn xung quanh, có nhiều nguồn khác nhau và thay đổi theo vị trí và tần số. Ở tần số thấp nhất, từ khoảng 0,1 Hz đến 10 Hz, nhiễu loạn đại dương và vi địa chấn là những nguyên nhân chính gây ra nền tiếng ồn. Các mức phổ tiếng ồn điển hình giảm khi tần số tăng từ khoảng 140 dB re 1 μPa2 /Hz ở 1 Hz xuống khoảng 30 dB re 1 μPa2 /Hz ở 100 kHz. Giao thông tàu xa là một trong những nguồn tiếng ồn chiếm ưu thế ở hầu hết các khu vực với tần số khoảng 100 Hz, trong khi tiếng ồn bề mặt do gió gây ra là nguồn chính giữa 1 kHz và 30 kHz. Ở tần số rất cao, trên 100 kHz, nhiễu nhiệt của các phân tử nước bắt đầu chiếm ưu thế. Mức phổ nhiễu nhiệt ở 100 kHz là 25 dB re 1 μPa2 /Hz. Mật độ phổ của tiếng ồn nhiệt tăng 20 dB mỗi thập kỷ (xấp xỉ 6 dB mỗi quãng tám).
Các nguồn âm thanh thoáng qua cũng góp phần tạo ra tiếng ồn xung quanh. Chúng có thể bao gồm hoạt động địa chất không liên tục, chẳng hạn như động đất và núi lửa dưới nước, lượng mưa trên bề mặt và hoạt động sinh học. Các nguồn sinh học bao gồm động vật biển có vú (đặc biệt là cá voi xanh, vây và cá nhà táng), một số loại cá và tôm chụp.
Mưa có thể tạo ra mức độ tiếng ồn xung quanh cao. Tuy nhiên, mối quan hệ bằng số giữa tốc độ mưa và mức độ tiếng ồn xung quanh rất khó xác định vì việc đo tốc độ mưa gặp khó khăn trên biển.
Âm vang
Nhiều phép đo đã được thực hiện về mặt biển, đáy biển và âm vang. Các mô hình thực nghiệm đôi khi được bắt nguồn từ những điều này. Một biểu thức thường được sử dụng cho băng tần 0,4 đến 6,4 kHz là của Chapman và Harris. Người ta thấy rằng một dạng sóng hình sin được lan truyền theo tần số do chuyển động bề mặt. Đối với âm vang phía dưới, Luật Lambert thường được áp dụng gần đúng, ví dụ, xem Mackenzie. Âm vang âm lượng thường được phát hiện chủ yếu xảy ra theo lớp, thay đổi độ sâu theo thời gian trong ngày, ví dụ: xem Marshall và Chapman. Mặt dưới của băng có thể tạo ra âm vang mạnh khi nó gồ ghề, ví dụ như xem Milne.
Tổn hao đáy
Tổn hao đáy đã được đo như là một hàm của góc nghiêng đối với nhiều tần số ở các vị trí khác nhau, ví dụ như các tần số của Cơ quan Khảo sát Địa vật lý Biển Hoa Kỳ. Sự tổn hao phụ thuộc vào tốc độ âm thanh ở phía dưới (bị ảnh hưởng bởi độ dốc và phân lớp) và bởi độ nhám. Các biểu đồ đã được tạo ra cho tổn hao dự kiến trong các trường hợp cụ thể. Ở vùng nước nông, tổn hao đáy thường có tác động chủ yếu đến sự lan truyền tầm xa. Ở tần số thấp, âm thanh có thể truyền qua trầm tích rồi quay trở lại nước.
Nghe dưới nước
So sánh với mức âm thanh trong không khí
Giống như âm thanh trong không khí, mức áp suất âm thanh dưới nước thường được báo cáo theo đơn vị decibel, nhưng có một số khác biệt quan trọng gây khó khăn (và thường không phù hợp) khi so sánh SPL trong nước với SPL trong không khí. Những khác biệt này bao gồm:
– chênh lệch áp suất tham chiếu: 1 μPa (một micropascal hoặc một phần triệu pascal) thay vì 20 μPa.
– sự khác biệt trong cách giải thích: có hai trường phái tư tưởng, một trường phái cho rằng áp suất nên được so sánh trực tiếp và trường phái kia trước tiên nên chuyển đổi thành cường độ của một sóng phẳng tương đương.
– sự khác biệt về độ nhạy của thính giác: bất kỳ so sánh nào với âm thanh (trọng số A) trong không khí đều cần tính đến sự khác biệt về độ nhạy của thính giác, của thợ lặn là người hoặc động vật khác.
Thính giác của con người
Độ nhạy thính giác
SPL âm thanh thấp nhất đối với người thợ lặn có thính giác bình thường là khoảng 67 dB re 1 μPa, với độ nhạy lớn nhất xảy ra ở tần số khoảng 1 kHz. Điều này tương ứng với cường độ âm thanh 5,4 dB, hoặc cao hơn 3,5 lần so với ngưỡng trong không khí.
Ngưỡng an toàn
Mức độ âm thanh dưới nước cao tạo ra mối nguy hiểm tiềm tàng cho thợ lặn con người. Dự án SOLMAR của Trung tâm nghiên cứu dưới đáy biển NATO đã báo cáo các hướng dẫn về sự tiếp xúc của thợ lặn với âm thanh dưới nước. Người thợ lặn tiếp xúc với SPL trên 154 dB re 1 μPa trong dải tần số 0,6 đến 2,5 kHz được báo cáo là có những thay đổi về nhịp tim hoặc tần số thở. Sự ác cảm của người dùng đối với âm thanh tần số thấp phụ thuộc vào mức áp suất âm thanh và tần số trung tâm.
Loài khác
Động vật có vú sống dưới nước
Cá heo và các loài cá voi có răng khác được biết đến với khả năng nghe nhạy bén, đặc biệt là ở dải tần từ 5 đến 50 kHz. Một số loài có ngưỡng nghe từ 30 đến 50 dB re 1 μPa trong dải tần số này. Ví dụ: ngưỡng nghe của cá voi sát thủ xảy ra ở áp suất âm thanh RMS là 0,02 mPa (và tần số 15 kHz), tương ứng với ngưỡng SPL là 26 dB re 1 μPa.
Mức độ âm thanh dưới nước cao tạo ra mối nguy hiểm tiềm ẩn đối với động vật biển và động vật lưỡng cư. Tác động của việc tiếp xúc với tiếng ồn dưới nước được xem xét bởi Southall et al.
Cá
Độ nhạy thính giác của cá được xem xét bởi Ladich và Fay. Ngưỡng nghe của cá lính là 0,32 mPa (50 dB re 1 μPa) ở 1,3 kHz, trong khi tôm hùm có ngưỡng nghe là 1,3 Pa ở 70 Hz (122 dB re 1 μPa). Tác động của việc tiếp xúc với tiếng ồn dưới nước được xem xét bởi Popper et al.
Chim thủy sinh
Một số loài chim sống dưới nước đã được quan sát để phản ứng với âm thanh dưới nước trong phạm vi 1-4 kHz, tuân theo dải tần nhạy cảm với thính giác tốt nhất của loài chim trong không khí. Vịt biển và chim cốc đã được huấn luyện để phản ứng với âm thanh từ 1-4 kHz với ngưỡng nghe thấp nhất (độ nhạy cao nhất) là 71 dB re 1 μPa (chim cốc) và 105 dB re 1 μPa (seaduck). Các loài lặn có một số khác biệt về hình thái ở tai so với các loài sống trên cạn, cho thấy một số sự thích nghi của tai ở các loài chim lặn với điều kiện nước
Ứng dụng của âm học dưới nước
Sonar
Sonar là tên được đặt cho tương đương âm thanh của radar. Các xung âm thanh được sử dụng để thăm dò biển và tiếng vang sau đó được xử lý để trích xuất thông tin về biển, ranh giới của nó và các vật thể chìm dưới nước. Một cách sử dụng khác, được gọi là sonar thụ động, cố gắng làm điều tương tự bằng cách lắng nghe âm thanh phát ra từ các vật thể dưới nước.
Thông tin liên lạc dưới nước
Nhu cầu đo từ xa âm thanh dưới nước tồn tại trong các ứng dụng như thu thập dữ liệu để giám sát môi trường, liên lạc với và giữa các phương tiện có người lái và không người lái dưới nước, truyền giọng nói của thợ lặn… Một ứng dụng liên quan là điều khiển từ xa dưới nước, trong đó đo từ xa âm thanh được sử dụng để đo từ xa kích hoạt một công tắc hoặc kích hoạt một sự kiện. Một ví dụ nổi bật về điều khiển từ xa dưới nước là các bản phát hành âm thanh, thiết bị được sử dụng để đưa các gói thiết bị được triển khai dưới đáy biển hoặc các tải trọng khác lên bề mặt theo lệnh từ xa khi kết thúc quá trình triển khai. Truyền thông âm thanh tạo thành một lĩnh vực nghiên cứu tích cực với những thách thức đáng kể phải vượt qua, đặc biệt là ở các kênh ngang, nước nông. So với viễn thông vô tuyến, băng thông khả dụng bị giảm đi vài bậc độ lớn. Hơn nữa, tốc độ âm thanh thấp làm cho sự lan truyền đa đường kéo dài theo các khoảng trễ thời gian hàng chục hoặc hàng trăm mili giây, cũng như sự dịch chuyển và lan truyền Doppler đáng kể. Thông thường, các hệ thống thông tin liên lạc bằng âm thanh không bị giới hạn bởi tiếng ồn, mà bởi âm vang và sự thay đổi theo thời gian vượt quá khả năng của các thuật toán máy thu. Độ trung thực của các liên kết liên lạc dưới nước có thể được cải thiện đáng kể bằng cách sử dụng mảng điện thoại dưới nước, cho phép các kỹ thuật xử lý như định dạng chùm thích ứng và kết hợp đa dạng.
Điều hướng và theo dõi dưới nước
Điều hướng và theo dõi dưới nước là yêu cầu phổ biến đối với hoạt động thăm dò và làm việc của thợ lặn, ROV, phương tiện tự hành dưới nước UUV (unmanned underwater vehicles), tàu lặn có người lái (manned submersibles) cũng như tàu ngầm. Không giống như hầu hết các tín hiệu vô tuyến được hấp thụ nhanh chóng, âm thanh lan truyền xa dưới nước và với tốc độ có thể được đo hoặc ước tính chính xác. Do đó, nó có thể được sử dụng để đo chính xác khoảng cách giữa mục tiêu được theo dõi và một hoặc nhiều tham chiếu của các trạm cơ sở và lập tam giác vị trí của mục tiêu, đôi khi với độ chính xác đến từng centimet. Bắt đầu từ những năm 1960, điều này đã tạo ra các hệ thống định vị âm thanh dưới nước hiện đang được sử dụng rộng rãi.
Thăm dò địa chấn
Thăm dò địa chấn liên quan đến việc sử dụng âm thanh tần số thấp (< 100 Hz) để thăm dò sâu vào đáy biển. Mặc dù độ phân giải tương đối kém do bước sóng dài, âm thanh tần số thấp được ưu tiên hơn vì tần số cao bị suy giảm nhiều khi chúng di chuyển qua đáy biển. Các nguồn âm thanh được sử dụng bao gồm súng hơi, thiết bị rung và chất nổ.
Quan sát thời tiết và khí hậu
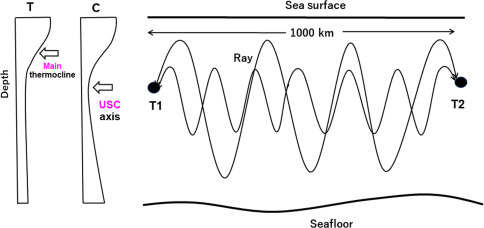
Cảm biến âm thanh có thể được sử dụng để theo dõi âm thanh do gió và lượng mưa tạo ra. Ví dụ, máy đo mưa âm thanh được mô tả bởi Nystuen. Sét đánh cũng có thể được phát hiện. Phép đo nhiệt độ âm thanh của khí hậu đại dương ATOC (Acoustic thermometry of ocean climate) sử dụng âm thanh tần số thấp để đo nhiệt độ đại dương toàn cầu.
Hải dương học âm thanh
Hải dương học âm thanh là việc sử dụng âm thanh dưới nước để nghiên cứu biển, ranh giới và nội dung của nó.
Lịch sử
Mối quan tâm đến việc phát triển các hệ thống đo tiếng vang bắt đầu một cách nghiêm túc sau vụ đắm tàu RMS Titanic vào năm 1912. Theo lý thuyết, bằng cách gửi một sóng âm thanh về phía trước một con tàu, một tiếng vang dội lại từ phần chìm của một tảng băng trôi sẽ đưa ra cảnh báo sớm về các vụ va chạm. Bằng cách hướng cùng một loại chùm tia xuống dưới, độ sâu của đáy đại dương có thể được tính toán.
Máy đo tiếng vọng sâu trong đại dương thực tế đầu tiên được phát minh bởi Harvey C. Hayes, một nhà vật lý của Hải quân Hoa Kỳ. Lần đầu tiên, có thể tạo ra một mặt cắt gần như liên tục của đáy đại dương dọc theo hành trình của một con tàu. Hồ sơ đầu tiên như vậy được Hayes thực hiện trên tàu USS Stewart, một tàu khu trục của Hải quân đi từ Newport đến Gibraltar trong khoảng thời gian từ ngày 22 đến ngày 29/6/1922. Trong tuần đó, 900 lần đo đáy đại dương đã được thực hiện.
Sử dụng một máy đo tiếng vang tinh chế, tàu khảo sát Meteor của Đức đã thực hiện một số chuyến đi xuyên qua Nam Đại Tây Dương từ xích đạo đến Nam Cực trong khoảng thời gian từ 1925 đến 1927, thu âm mỗi 5 đến 20 dặm. Công việc của họ đã tạo ra bản đồ chi tiết đầu tiên của Mid-Atlantic Ridge. Nó cho thấy Ridge là một dãy núi gồ ghề chứ không phải là cao nguyên bằng phẳng như một số nhà khoa học đã hình dung. Kể từ thời điểm đó, cả tàu hải quân và tàu nghiên cứu đã vận hành máy đo tiếng vang gần như liên tục khi ở trên biển.
Những đóng góp quan trọng cho hải dương học âm thanh đã được thực hiện bởi:
– Leonid Brekhovskikh.
– Walter Munk.
– Herman Medwin.
– John L. Spiesberger.
– CC Leroy.
– David E. Weston.
– D. Van Holliday.
– Charles Greenlaw.
Thiết bị sử dụng
Việc sử dụng công nghệ sonar và âm thanh sớm nhất và rộng rãi nhất để nghiên cứu các đặc tính của biển là việc sử dụng máy đo độ sâu tiếng vọng cầu vồng để đo độ sâu của nước. Máy đo âm thanh là thiết bị được sử dụng để lập bản đồ nhiều dặm đáy đại dương Cảng Santa Barbara cho đến năm 1993.
Đồng hồ đo độ sâu của nước. Nó hoạt động bằng cách gửi âm thanh điện tử từ tàu, do đó cũng nhận được sóng âm thanh dội lại từ đáy đại dương. Một biểu đồ giấy di chuyển qua máy đo độ sâu và được hiệu chỉnh để ghi lại độ sâu.
Khi công nghệ tiến bộ, sự phát triển của sonar độ phân giải cao trong nửa sau của thế kỷ XX đã giúp không chỉ phát hiện các vật thể dưới nước mà còn phân loại chúng và thậm chí chụp ảnh chúng. Các cảm biến điện tử hiện được gắn vào ROV vì ngày nay, tàu hoặc tàu ngầm rô bốt đều có Phương tiện vận hành từ xa ROV (Remotely Operated Vehicles). Có máy ảnh gắn liền với các thiết bị này đưa ra hình ảnh chính xác. Các nhà hải dương học có thể có được chất lượng hình ảnh rõ ràng và chính xác. “Hình ảnh” cũng có thể được gửi từ sonar bằng cách âm thanh phản xạ với môi trường xung quanh đại dương. Thông thường, sóng âm thanh phản xạ lại động vật, cung cấp thông tin có thể được ghi lại trong các nghiên cứu sâu hơn về hành vi của động vật.
Sinh vật biển
Do đặc tính lan truyền tuyệt vời của nó, âm thanh dưới nước được sử dụng như một công cụ hỗ trợ nghiên cứu sinh vật biển, từ vi sinh vật phù du đến cá voi xanh. Máy đo tiếng vang thường được sử dụng để cung cấp dữ liệu về sự phong phú, phân bố và thông tin về hành vi của sinh vật biển. Máy đo tiếng vang (Echo sounders), còn được gọi là máy đo thủy âm (hydroacoustics) cũng được sử dụng để xác định vị trí, số lượng, kích thước và sinh khối của cá.
Phương pháp đo từ xa bằng âm thanh cũng được sử dụng để theo dõi cá và động vật hoang dã biển. Một máy phát âm thanh được gắn vào cá (đôi khi ở bên trong) trong khi một dãy máy thu nghe thông tin do sóng âm thanh truyền tải. Điều này cho phép các nhà nghiên cứu theo dõi chuyển động của các cá nhân ở quy mô vừa và nhỏ.
Tôm súng lục tạo ra bong bóng tạo bọt siêu âm đạt tới 5.000 K (4.700 °C)
Vật lý hạt
Neutrino là hạt cơ bản tương tác rất yếu với vật chất khác. Vì lý do này, nó đòi hỏi thiết bị phát hiện trên quy mô rất lớn và đại dương đôi khi được sử dụng cho mục đích này. Đặc biệt, người ta cho rằng neutrino năng lượng cực cao trong nước biển có thể được phát hiện bằng âm thanh.
Các ứng dụng khác
Các ứng dụng khác bao gồm:
– đo lượng mưa.
– đo tốc độ gió.
– nhiệt kế toàn cầu.
– giám sát trao đổi khí đại dương-khí quyển.
– hệ thống cảm biến mảng kéo theo giám sát.
– bộ định hình dòng điện Doppler âm thanh để đo tốc độ nước.
– máy ảnh âm thanh.
– âm thanh lỏng.
– giám sát âm thanh thụ động./.