Phương tiện vận hành từ xa ROV (Remotely operated underwater vehicle) là một tàu lặn tự do được sử dụng để thực hiện các nhiệm vụ như vận hành van, chức năng thủy lực và các nhiệm vụ chung khác trong ngành dầu khí dưới biển. ROV cũng có thể mang theo các gói công cụ để thực hiện các nhiệm vụ cụ thể như kéo vào và kết nối các đường dây và dây dẫn linh hoạt cũng như thay thế bộ phận.
Mô tả
Ý nghĩa này khác với các phương tiện điều khiển từ xa hoạt động trên mặt đất hoặc trên không. ROV không có người sử dụng, thường có tính cơ động cao và được vận hành bởi thủy thủ đoàn trên tàu/sàn nổi hoặc trên đất liền gần đó. Chúng phổ biến trong các ngành công nghiệp nước sâu như khai thác hydrocarbon ngoài khơi. Nói chung, nhưng không nhất thiết, chúng được liên kết với tàu mẹ bằng dây buộc nổi trung tính hoặc, thường khi làm việc trong điều kiện khắc nghiệt hoặc ở vùng nước sâu hơn, cáp rốn mang tải được sử dụng cùng với hệ thống quản lý dây buộc TMS (tether management system). TMS là một thiết bị giống như gara chứa ROV trong quá trình hạ thấp qua vùng nhiễu động hoặc trên các ROV cấp công việc lớn hơn, một cụm riêng biệt được gắn trên ROV. Mục đích của TMS là kéo dài và rút ngắn dây buộc để giảm thiểu tác động của lực kéo cáp ở nơi có dòng chảy dưới nước. Cáp rốn (umbilical cable) là một loại cáp bọc thép chứa một nhóm dây dẫn điện và sợi quang mang tín hiệu điện, video và dữ liệu giữa người vận hành và TMS. Khi được sử dụng, TMS sẽ chuyển tiếp tín hiệu và nguồn điện cho ROV xuống cáp nối. Và ở ROV, nguồn điện sẽ được phân phối giữa các bộ phận của nó. Tuy nhiên, trong các ứng dụng công suất cao, hầu hết năng lượng điện đều dẫn động động cơ điện công suất cao dẫn động bơm thủy lực. Sau đó, máy bơm được sử dụng để tạo động cơ đẩy và cung cấp năng lượng cho các thiết bị như công cụ mô-men xoắn và cánh tay điều khiển, những nơi mà động cơ điện sẽ quá khó để thực hiện dưới biển. Hầu hết ROV đều được trang bị ít nhất một máy quay video và đèn chiếu sáng. Các thiết bị bổ sung thường được bổ sung để mở rộng khả năng của phương tiện. Chúng có thể bao gồm sonar, từ kế, máy ảnh tĩnh, máy thao tác hoặc tay cắt, dụng cụ lấy mẫu nước và dụng cụ đo độ trong của nước, nhiệt độ nước, mật độ nước, tốc độ âm thanh, độ xuyên sáng và nhiệt độ.
Lịch sử
Trong những năm 1970 và 1980, Hải quân Hoàng gia Anh đã sử dụng “Cutlet”, một tàu lặn hoạt động từ xa, để thu hồi ngư lôi và mìn thực hành. RCA (Noise) duy trì Hệ thống “Cutlet 02” dựa trên phạm vi BUTEC, trong khi hệ thống “03” được đặt tại căn cứ tàu ngầm trên tàu Clyde và được vận hành và bảo trì bởi nhân viên RN.
Hải quân Hoa Kỳ đã tài trợ phần lớn sự phát triển công nghệ ROV ban đầu vào những năm 1960 cho cái mà lúc đó được đặt tên là “Phương tiện phục hồi dưới nước được điều khiển bằng cáp” CURV (Cable-Controlled Underwater Recovery Vehicle). Điều này tạo ra khả năng thực hiện hoạt động cứu hộ dưới biển sâu và thu hồi các vật thể dưới đáy đại dương, chẳng hạn như một quả bom hạt nhân bị mất ở Biển Địa Trung Hải sau vụ tai nạn máy bay Palomares B-52 năm 1966. Xây dựng trên nền tảng công nghệ này; ngành công nghiệp dầu khí ngoài khơi đã tạo ra các ROV cấp công nhân để hỗ trợ phát triển các mỏ dầu ngoài khơi. Hơn một thập kỷ sau khi được giới thiệu lần đầu tiên, ROV đã trở nên cần thiết vào những năm 1980 khi phần lớn hoạt động phát triển ngoài khơi mới vượt quá tầm với của thợ lặn con người. Vào giữa những năm 1980, ngành ROV hàng hải bị trì trệ nghiêm trọng trong phát triển công nghệ, một phần do giá dầu giảm và suy thoái kinh tế toàn cầu. Kể từ đó, sự phát triển công nghệ trong ngành ROV đã tăng tốc và ngày nay ROV thực hiện nhiều nhiệm vụ trong nhiều lĩnh vực. Nhiệm vụ của họ bao gồm từ việc kiểm tra đơn giản các cấu trúc, đường ống và nền tảng dưới biển cho đến kết nối các đường ống và đặt các ống góp dưới nước. Chúng được sử dụng rộng rãi cả trong quá trình xây dựng ban đầu của một công trình phát triển dưới biển cũng như việc sửa chữa và bảo trì sau đó.
ROV chìm đã được sử dụng để xác định vị trí của nhiều vụ đắm tàu lịch sử, bao gồm RMS Titanic, Bismarck, USS Yorktown và SS Central America. Trong một số trường hợp, chẳng hạn như tàu Titanic và SS Central America, ROV đã được sử dụng để thu hồi vật liệu từ đáy biển và đưa nó lên bề mặt.
Trong khi ngành dầu khí sử dụng phần lớn ROV, các ứng dụng khác bao gồm khoa học, quân sự và cứu hộ. Quân đội sử dụng ROV cho các nhiệm vụ như rà phá và kiểm tra bom mìn. Việc sử dụng khoa học sẽ được thảo luận dưới đây.
Sự thi công
ROV cấp công việc được chế tạo với một gói nổi lớn đặt trên khung nhôm để cung cấp lực nổi cần thiết để thực hiện nhiều nhiệm vụ khác nhau. Độ phức tạp của việc xây dựng khung nhôm khác nhau tùy thuộc vào thiết kế của nhà sản xuất. Bọt cú pháp thường được sử dụng cho vật liệu tuyển nổi. Một thanh trượt dụng cụ có thể được lắp ở dưới cùng của hệ thống để chứa nhiều loại cảm biến hoặc gói dụng cụ. Bằng cách đặt các bộ phận nhẹ ở phía trên và các bộ phận nặng ở phía dưới, hệ thống tổng thể có sự tách biệt lớn giữa tâm nổi và trọng tâm: điều này mang lại sự ổn định và độ cứng để thực hiện công việc dưới nước. Bộ đẩy được đặt giữa tâm nổi và trọng tâm để duy trì tư thế ổn định của robot khi di chuyển. Các cấu hình máy đẩy và thuật toán điều khiển khác nhau có thể được sử dụng để đưa ra khả năng kiểm soát vị trí và thái độ thích hợp trong quá trình vận hành, đặc biệt là ở vùng nước có dòng chảy cao. Bộ đẩy thường có cấu hình vectơ cân bằng để mang lại khả năng điều khiển chính xác nhất có thể.
Các bộ phận điện có thể được đặt trong các ngăn kín nước chứa đầy dầu hoặc các ngăn khí quyển độc lập để bảo vệ chúng khỏi bị ăn mòn trong nước biển và bị nghiền nát do áp suất cực lớn tác động lên ROV khi làm việc sâu. ROV sẽ được trang bị camera, đèn và bộ điều khiển để thực hiện các công việc cơ bản. Các cảm biến và công cụ bổ sung có thể được trang bị khi cần thiết cho các nhiệm vụ cụ thể. Người ta thường thấy ROV có hai cánh tay robot; mỗi tay máy có thể có hàm kẹp khác nhau. Các camera cũng có thể được bảo vệ để bảo vệ khỏi va chạm. ROV có thể được trang bị thiết bị sonar và lidar.
Phần lớn ROV dành cho công việc được chế tạo như mô tả ở trên; tuy nhiên, đây không phải là phong cách duy nhất trong phương pháp xây dựng ROV. ROV nhỏ hơn có thể có thiết kế rất khác nhau, mỗi thiết kế đều phù hợp với nhiệm vụ dự định của nó. ROV lớn hơn thường được triển khai và vận hành từ tàu, vì vậy ROV có thể có các đường trượt để đưa lên boong.
Cấu hình
Phương tiện điều khiển từ xa có ba cấu hình cơ bản. Mỗi trong số này mang lại những hạn chế riêng.
– ROV khung mở hoặc khung hộp – đây là cấu hình ROV quen thuộc nhất – bao gồm một khung mở nơi chứa tất cả các cảm biến vận hành, bộ đẩy và các bộ phận cơ khí. Chúng rất hữu ích khi bơi tự do trong dòng nước nhẹ (dưới 4 hl/g dựa trên thông số kỹ thuật của nhà sản xuất). Chúng không thích hợp cho các ứng dụng được kéo do thiết kế thủy động lực học rất kém. Hầu hết ROV cấp công việc và cấp công việc nặng đều dựa trên cấu hình này.
– ROV hình ngư lôi – đây là cấu hình phổ biến để thu thập dữ liệu hoặc ROV cấp kiểm tra. Hình dạng ngư lôi có lực cản thủy động thấp nhưng có những hạn chế đáng kể về khả năng kiểm soát. Hình dạng ngư lôi yêu cầu tốc độ cao (đó là lý do tại sao hình dạng này được sử dụng cho đạn dược quân sự) để duy trì ổn định về vị trí và thái độ, nhưng loại này rất dễ bị tổn thương ở tốc độ cao. Ở tốc độ chậm (0-4 hl/g) phải chịu nhiều sự mất ổn định, chẳng hạn như độ cuộn và độ sâu do dây buộc gây ra, độ cuộn, độ sâu và độ lệch do dòng điện gây ra. Nó có các bánh lái hạn chế ở đuôi, điều này dễ gây ra sự mất ổn định bù quá mức. Chúng thường được gọi là “Cá kéo”, vì chúng thường được sử dụng làm ROV kéo.
Sử dụng khảo sát
ROV khảo sát hoặc kiểm tra thường nhỏ hơn ROV cấp công việc và thường được phân loại phụ thành Loại I: Chỉ quan sát hoặc Loại II: Quan sát có tải trọng. Chúng được sử dụng để hỗ trợ khảo sát thủy văn, tức là vị trí của các công trình dưới biển, cũng như cho công việc kiểm tra, ví dụ như khảo sát đường ống, kiểm tra vỏ ngoài và kiểm tra thân tàu biển. ROV khảo sát (còn được gọi là “nhãn cầu”), mặc dù nhỏ hơn loại làm việc, thường có hiệu suất tương đương về khả năng giữ vị trí trong dòng nước và thường mang theo các công cụ và thiết bị tương tự – ánh sáng, máy ảnh, sóng siêu âm, đường cơ sở cực ngắn USBL (ultra-short baseline), máy quang phổ Raman và đèn nhấp nháy tùy thuộc vào khả năng tải trọng của phương tiện và nhu cầu của người dùng.
Sử dụng hỗ trợ các hoạt động lặn
Hoạt động ROV kết hợp với hoạt động lặn đồng thời chịu sự giám sát chung của người giám sát lặn vì lý do an toàn.
Hiệp hội các nhà thầu hàng hải quốc tế (IMCA) đã công bố hướng dẫn về hoạt động ngoài khơi của ROV trong các hoạt động kết hợp với thợ lặn trong tài liệu Can thiệp phương tiện vận hành từ xa trong hoạt động lặn (IMCA D 054, IMCA R 020), dành cho cả nhà thầu và khách hàng sử dụng.
Sử dụng quân sự
ROV đã được hải quân một số nước sử dụng trong nhiều thập kỷ, chủ yếu để dò mìn và phá mìn.
Vào tháng 10/2008, Hải quân Hoa Kỳ bắt đầu cải tiến các hệ thống cứu hộ được thí điểm tại địa phương, dựa trên Mystic DSRV và tàu hỗ trợ, với hệ thống mô-đun, SRDRS, dựa trên ROV có người lái, có dây buộc được gọi là mô-đun cứu hộ điều áp PRM (pressurized rescue module). Điều này diễn ra sau nhiều năm thử nghiệm và tập trận với tàu ngầm của hạm đội của một số quốc gia. Nó cũng sử dụng ROV Sibitzky không người lái để khảo sát tàu ngầm bị vô hiệu hóa và chuẩn bị tàu ngầm cho PRM.
Hải quân Hoa Kỳ cũng sử dụng ROV có tên AN/SLQ-48 Mine Neutralization Vehicle (MNV) để rải mìn. Nó có thể đi xa con tàu 910 m nhờ có cáp kết nối và có thể đạt độ sâu 610 m. Các gói nhiệm vụ có sẵn cho MNV được gọi là MP1, MP2 và MP3:
– MP1 là máy cắt cáp mìn bề mặt để khai thác phục hồi hoặc xử lý vật liệu nổ (EOD).
– MP2 là một loại bom nhỏ chứa chất nổ cao liên kết polymer PBXN-103 nặng 34 kg để vô hiệu hóa mìn dưới đáy/mặt đất.
– MP3 là một dụng cụ kẹp cáp mìn neo và một phao có tổ hợp bom MP2 để vô hiệu hóa mìn neo dưới nước.
Thuốc nổ được kích nổ bằng tín hiệu âm thanh từ tàu.
Phương tiện tự động dưới biển không người lái AN/BLQ-11 (UUV) được thiết kế để có khả năng chống mìn bí mật và có thể được phóng từ một số tàu ngầm.
ROV của Hải quân Hoa Kỳ chỉ có trên các tàu chống mìn lớp Avenger. Sau khi tàu USS Guardian (MCM-5) bị hạ thủy và tàu USS Avenger (MCM-1) và USS Defender (MCM-2) ngừng hoạt động, chỉ còn 11 tàu quét mìn của Mỹ còn hoạt động ở vùng biển ven bờ Bahrain (USS Sentry (MCM-3)), USS Devastator (MCM-6), USS Gladiator (MCM-11) và USS Dextrous (MCM-13)), Nhật Bản (USS Patriot (MCM-7), USS Pioneer (MCM-9), USS Warrior (MCM- 10) và USS Chief (MCM-14)), và California (USS Champion (MCM-4), USS Scout (MCM-8) và USS Ardent (MCM-12)).
Vào ngày 19/8/2011, một tàu ngầm robot do Boeing sản xuất có tên Echo Ranger đang được quân đội Hoa Kỳ thử nghiệm để có thể sử dụng nhằm theo dõi vùng biển của kẻ thù, tuần tra các bến cảng địa phương nhằm phát hiện các mối đe dọa an ninh quốc gia và lùng sục đáy đại dương để phát hiện các mối nguy hiểm về môi trường. Hải quân Na Uy kiểm tra tàu Helge Ingstad bằng drone không người lái dưới nước Blueye Pioneer của Na Uy.
Khi khả năng của chúng phát triển, ROV nhỏ hơn cũng ngày càng được hải quân, lực lượng bảo vệ bờ biển và chính quyền cảng trên toàn cầu áp dụng, bao gồm Cảnh sát biển Hoa Kỳ và Hải quân Hoa Kỳ, Hải quân Hoàng gia Hà Lan, Hải quân Na Uy, Hải quân Hoàng gia và Lực lượng Biên phòng Ả Rập Xê Út. Chúng cũng đã được các sở cảnh sát và đội tìm kiếm và phục hồi áp dụng rộng rãi. Hữu ích cho nhiều nhiệm vụ kiểm tra dưới nước như xử lý vật liệu nổ (EOD), khí tượng, an ninh cảng, biện pháp đối phó với mìn (MCM) và tình báo hàng hải, giám sát, trinh sát (ISR).
Sử dụng trong khoa học
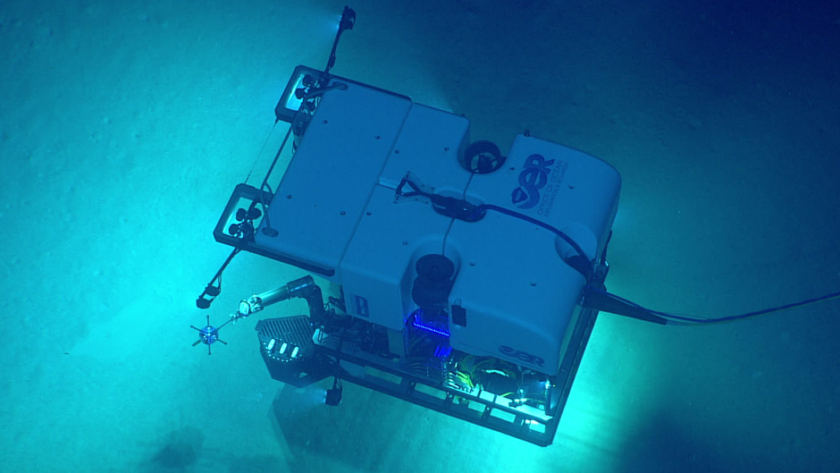
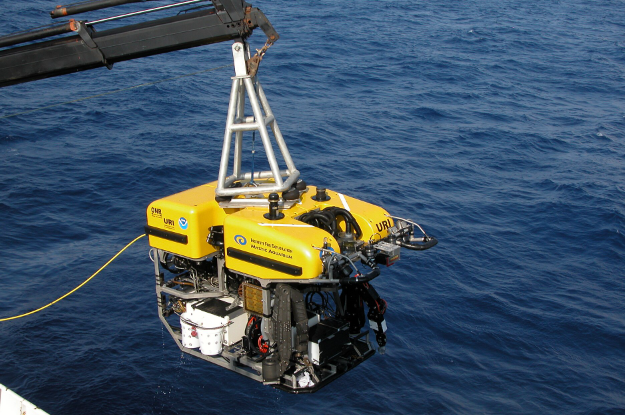
ROV cũng được cộng đồng khoa học sử dụng rộng rãi để nghiên cứu đại dương. Một số loài động vật và thực vật biển sâu đã được phát hiện hoặc nghiên cứu trong môi trường tự nhiên của chúng thông qua việc sử dụng ROV; ví dụ bao gồm sứa Stellamedusa ventana và quầng sáng giống lươn. Ở Hoa Kỳ, công việc tiên tiến được thực hiện tại một số tổ chức hải dương học công cộng và tư nhân, bao gồm Viện Nghiên cứu Thủy cung Vịnh Monterey (MBARI), Viện Hải dương học Woods Hole (WHOI) (với Nereus) và Đại học Rhode Island / Viện để thăm dò (URI/IFE). Ở Châu Âu, Viện Alfred Wegener sử dụng ROV để khảo sát băng biển ở Bắc Cực và Nam Cực, bao gồm đo lượng nước băng, độ truyền ánh sáng, trầm tích, oxy, nitrat, nhiệt độ nước biển và độ mặn. Với những mục đích này, nó được trang bị sonar đơn và đa tia, máy đo quang phổ, bộ điều khiển, máy đo huỳnh quang, độ dẫn điện/nhiệt độ/độ sâu (đo độ mặn) (CTD), quang phổ kế và máy quang phổ UV.
ROV khoa học có nhiều hình dạng và kích cỡ. Vì cảnh quay video tốt là thành phần cốt lõi của hầu hết các nghiên cứu khoa học biển sâu nên ROV nghiên cứu có xu hướng được trang bị hệ thống chiếu sáng công suất cao và camera phát sóng chất lượng. Tùy thuộc vào nghiên cứu đang được tiến hành, ROV khoa học sẽ được trang bị nhiều thiết bị lấy mẫu và cảm biến khác nhau. Nhiều thiết bị trong số này là các bộ phận thử nghiệm tiên tiến, độc nhất vô nhị đã được cấu hình để hoạt động trong môi trường khắc nghiệt của đại dương sâu thẳm. ROV khoa học cũng kết hợp rất nhiều công nghệ đã được phát triển cho lĩnh vực ROV thương mại, chẳng hạn như bộ điều khiển thủy lực và hệ thống định vị dưới biển có độ chính xác cao. Chúng cũng được sử dụng cho các dự án khảo cổ học dưới nước như Dự án xác tàu đắm Mardi Gras ở Vịnh Mexico và dự án CoMAS ở Biển Địa Trung Hải.
Có một số hệ thống cao cấp lớn hơn đáng chú ý về khả năng và ứng dụng của chúng. Phương tiện Tiburon của MBARI tiêu tốn hơn 6 triệu USD để phát triển và được sử dụng chủ yếu cho nghiên cứu thủy nhiệt và thủy nhiệt ở Bờ Tây Hoa Kỳ. Hệ thống Jason của WHOI đã có nhiều đóng góp đáng kể cho nghiên cứu hải dương học dưới biển sâu và tiếp tục hoạt động trên toàn cầu. Hercules ROV của URI/IFE là một trong những ROV khoa học đầu tiên kết hợp hoàn toàn hệ thống đẩy thủy lực và được trang bị độc đáo để khảo sát và khai quật các vụ đắm tàu cổ và hiện đại. Hệ thống ROPOS của Cơ sở Khoa học Chìm Canada liên tục được một số tổ chức khoa học đại dương và trường đại học hàng đầu sử dụng cho các nhiệm vụ đầy thách thức như phục hồi và thăm dò các miệng phun dưới biển sâu cho đến bảo trì và triển khai các đài quan sát đại dương.
Tiếp cận giáo dục
Chương trình giáo dục Phương tiện dưới nước được điều khiển từ xa (ROV) của SeaPerch là một công cụ và bộ công cụ giáo dục cho phép học sinh tiểu học, trung học cơ sở và trung học phổ thông chế tạo một phương tiện dưới nước đơn giản, vận hành từ xa, từ ống polyvinyl clorua (PVC) và các vật liệu dễ chế tạo khác. Chương trình SeaPerch dạy cho học sinh những kỹ năng cơ bản về thiết kế tàu và tàu ngầm, đồng thời khuyến khích học sinh khám phá kiến trúc hải quân cũng như các khái niệm kỹ thuật hàng hải và đại dương. SeaPerch được tài trợ bởi Văn phòng Nghiên cứu Hải quân, như một phần của Trách nhiệm Hải quân Quốc gia về Kỹ thuật Hải quân (NNRNE), và chương trình được quản lý bởi Hiệp hội Kiến trúc sư Hải quân và Kỹ sư Hàng hải.
Một ứng dụng cải tiến khác của công nghệ ROV là trong Dự án Xác tàu đắm Mardi Gras. Con tàu “Mardi Gras Shipwreck” đã chìm khoảng 200 năm trước, cách bờ biển Louisiana ở Vịnh Mexico khoảng 35 dặm ở độ sâu 1.200 m nước. Con tàu đắm, danh tính thực sự vẫn còn là một bí ẩn, đã bị lãng quên dưới đáy biển cho đến khi nó được phát hiện vào năm 2002 bởi một đội kiểm tra mỏ dầu làm việc cho Công ty Thu gom Khí đốt Okeanos (OGGC). Vào tháng 5/2007, một đoàn thám hiểm do Đại học Texas A&M dẫn đầu và được OGGC tài trợ theo thỏa thuận với Cơ quan Quản lý Khoáng sản (nay là BOEM), đã được triển khai để thực hiện cuộc khai quật khảo cổ khoa học sâu nhất từng được thực hiện vào thời điểm đó để nghiên cứu địa điểm dưới đáy biển. và phục hồi các hiện vật để trưng bày trước công chúng tại Bảo tàng Bang Louisiana. Là một phần của hoạt động giáo dục tiếp cận cộng đồng, Nautilus Productions hợp tác với BOEM, Đại học Texas A&M, Mạng lưới Khảo cổ Công cộng Florida và Môi trường Veolia đã sản xuất một bộ phim tài liệu HD dài một giờ về dự án, các video ngắn để công chúng xem và cung cấp video cập nhật trong suốt chuyến thám hiểm. Đoạn video từ ROV là một phần không thể thiếu trong hoạt động tiếp cận này và được sử dụng rộng rãi trong bộ phim tài liệu về vụ đắm tàu Mystery Mardi Gras.
Trung tâm Giáo dục Công nghệ Tiên tiến Hàng hải (MATE) sử dụng ROV để dạy học sinh trung học cơ sở, trung học phổ thông, cao đẳng cộng đồng và sinh viên đại học về các nghề nghiệp liên quan đến đại dương và giúp họ cải thiện các kỹ năng khoa học, công nghệ, kỹ thuật và toán học. Cuộc thi ROV sinh viên hàng năm của MATE thách thức các đội sinh viên từ khắp nơi trên thế giới cạnh tranh với ROV do họ thiết kế và xây dựng. Cuộc thi sử dụng các nhiệm vụ thực tế dựa trên ROV để mô phỏng môi trường làm việc hiệu suất cao, tập trung vào một chủ đề khác giúp sinh viên tiếp cận với nhiều khía cạnh khác nhau của các kỹ năng và nghề nghiệp kỹ thuật liên quan đến hàng hải. Cuộc thi ROV được tổ chức bởi MATE và Ủy ban ROV của Hiệp hội Công nghệ Hàng hải và được tài trợ bởi các tổ chức như Cơ quan Hàng không và Vũ trụ Quốc gia (NASA), Cơ quan Khí quyển và Đại dương Quốc gia (NOAA), và Oceaneering, cùng nhiều tổ chức khác công nhận giá trị gồm những sinh viên được đào tạo chuyên sâu với các kỹ năng công nghệ như thiết kế, kỹ thuật và thí điểm ROV. MATE được thành lập với sự tài trợ của Quỹ Khoa học Quốc gia và có trụ sở tại Monterey Peninsula College ở Monterey, California.
Sử dụng phát sóng
Khi máy ảnh và cảm biến phát triển và các phương tiện điều khiển trở nên linh hoạt và đơn giản hơn, ROV đã trở nên phổ biến, đặc biệt với các nhà làm phim tài liệu do khả năng tiếp cận các khu vực sâu, nguy hiểm và hạn chế mà thợ lặn không thể tiếp cận. Không có giới hạn về thời gian ROV có thể chìm trong nước và ghi lại cảnh quay, điều này cho phép thu được những góc nhìn chưa từng thấy trước đây. ROV đã được sử dụng để quay một số phim tài liệu, bao gồm Shark Men của Nat Geo và Bí mật đen tối của Lusitania và Điệp viên đặc biệt về động vật hoang dã của BBC trong cuộc trò chuyện nhóm.
Do được quân đội, cơ quan thực thi pháp luật và các dịch vụ bảo vệ bờ biển sử dụng rộng rãi, ROV cũng đã xuất hiện trong các bộ phim truyền hình tội phạm như loạt phim CBS nổi tiếng CSI.
Sở thích sử dụng
Với sự quan tâm ngày càng tăng đối với đại dương của nhiều người, cả già lẫn trẻ, cũng như sự sẵn có ngày càng tăng của các thiết bị đắt tiền và phi thương mại, ROV đã trở thành sở thích phổ biến của nhiều người. Sở thích này liên quan đến việc chế tạo các ROV nhỏ thường được làm từ ống nhựa PVC và thường có thể lặn xuống độ sâu từ 50 đến 100 feet nhưng một số đã đạt được tới độ sâu 300 feet. Mối quan tâm mới này đối với ROV đã dẫn đến sự hình thành của nhiều cuộc thi, bao gồm MATE (Giáo dục Công nghệ Tiên tiến Hàng hải) và NURC (Thử thách Robot Dưới nước Quốc gia). Đây là những cuộc thi trong đó các đối thủ, phổ biến nhất là các trường học và các tổ chức khác, cạnh tranh với nhau trong một loạt nhiệm vụ sử dụng ROV mà họ đã xây dựng. Hầu hết các ROV theo sở thích đều được thử nghiệm trong bể bơi và hồ nơi nước lặng, tuy nhiên một số đã thử nghiệm ROV cá nhân của họ trên biển. Tuy nhiên, làm như vậy sẽ tạo ra nhiều khó khăn do sóng và dòng chảy có thể khiến ROV đi chệch hướng hoặc khó vượt qua làn sóng do kích thước động cơ nhỏ được trang bị cho hầu hết các ROV theo sở thích.
Phân loại
Phương tiện lặn ROV thường được phân loại thành các loại dựa trên kích thước, trọng lượng, khả năng hoặc công suất của chúng. Một số xếp hạng phổ biến là:
– Micro – ROV loại Micro thường có kích thước và trọng lượng rất nhỏ. ROV loại Micro ngày nay có thể nặng dưới 3 kg. Những ROV này được sử dụng như một giải pháp thay thế cho thợ lặn, đặc biệt ở những nơi mà thợ lặn không thể đi vào như cống rãnh, đường ống hoặc khoang nhỏ.
– Mini – ROV loại Mini thường nặng khoảng 15 kg. ROV hạng nhỏ cũng được sử dụng như một giải pháp thay thế cho thợ lặn. Một người có thể vận chuyển hệ thống ROV hoàn chỉnh ra ngoài trên một chiếc thuyền nhỏ, triển khai nó và hoàn thành công việc mà không cần sự trợ giúp từ bên ngoài. Một số lớp Micro và Mini được gọi là lớp “nhãn cầu” để phân biệt chúng với ROV có thể thực hiện các nhiệm vụ can thiệp.
– Cơ bản – thường dưới 5 mã lực (động cơ đẩy); đôi khi các dụng cụ kẹp tay cầm ba ngón tay nhỏ đã được lắp đặt, chẳng hạn như trên RCV 225 đời đầu. Những ROV này có thể mang theo một thiết bị sonar và thường được sử dụng trong các ứng dụng khảo sát ánh sáng. Thông thường, độ sâu làm việc tối đa là dưới 1.000 m mặc dù một chiếc đã được phát triển để có thể đi sâu tới 7.000 m.
– Hạng kiểm tra – đây thường là các ROV thu thập dữ liệu và quan sát sử dụng trong thương mại hoặc công nghiệp – thường được trang bị video cấp dữ liệu trực tiếp, ảnh tĩnh, sóng siêu âm và các cảm biến thu thập dữ liệu khác. ROV hạng kiểm tra cũng có thể có cánh tay thao tác để thực hiện công việc nhẹ và thao tác đối tượng.
– Hạng làm việc nhẹ – thường dưới 50 mã lực (động cơ đẩy). Những ROV này có thể mang theo một số bộ điều khiển. Khung gầm của chúng có thể được làm từ các polyme như polyetylen thay vì thép không gỉ hoặc hợp kim nhôm thông thường. Chúng thường có độ sâu làm việc tối đa dưới 2000 m.
– Hạng công việc nặng – thường dưới 220 mã lực (động cơ đẩy) với khả năng mang ít nhất hai bộ điều khiển. Chúng có độ sâu làm việc lên tới 3500 m.
– Đào rãnh & chôn cất – thường lớn hơn 200 mã lực (động cơ đẩy) và thường không lớn hơn 500 mã lực (trong khi một số vượt quá mức đó) với khả năng mang xe trượt đặt cáp và làm việc ở độ sâu lên tới 6000 m trong một số trường hợp.
– ROV lặn có thể là “bơi tự do” trong đó chúng hoạt động ở trạng thái nổi trung tính trên dây buộc từ tàu phóng hoặc bệ phóng hoặc chúng có thể được “để trong gara” khi chúng hoạt động từ “nhà để xe” hoặc “tophat” chìm trên dây buộc gắn vào vật nặng. Gara được hạ xuống từ tàu hoặc sân ga. Cả hai kỹ thuật đều có ưu và nhược điểm; tuy nhiên công việc rất sâu thường được thực hiện với một gara./.


