Sonar mảng kéo (Towed array sonar) là một hệ thống ống nghe dưới nước được kéo phía sau tàu ngầm hoặc tàu mặt nước qua dây cáp. Kéo theo các ống nghe dưới nước phía sau tàu, trên một dây cáp có thể dài hàng km, giữ cho các cảm biến của mảng cách xa các nguồn tiếng ồn của chính con tàu, cải thiện đáng kể tỷ lệ tín hiệu trên tạp âm của nó, và do đó hiệu quả của việc phát hiện và theo dõi các liên hệ mờ nhạt, chẳng hạn như các mối đe dọa tàu ngầm phát ra tiếng ồn thấp, yên tĩnh hoặc tín hiệu địa chấn.
Một mảng kéo cung cấp độ phân giải và phạm vi vượt trội so với sonar gắn trên thân tàu. Nó cũng bao gồm các vách ngăn, điểm mù của sonar gắn trên thân tàu. Tuy nhiên, việc sử dụng hiệu quả hệ thống sẽ hạn chế tốc độ của tàu và phải cẩn thận để bảo vệ dây cáp khỏi bị hư hại.
Lịch sử
Trong Thế chiến I, một mảng sonar kéo được gọi là “Electric Eel” (Con lươn điện) được phát triển bởi Harvey Hayes, một nhà vật lý của Hải quân Hoa Kỳ. Hệ thống này được cho là thiết kế mảng sonar kéo đầu tiên. Nó sử dụng hai dây cáp, mỗi dây có một tá ống nghe dưới nước. Dự án đã bị dừng lại sau chiến tranh.
Hải quân Hoa Kỳ đã tiếp tục phát triển công nghệ mảng kéo trong những năm 1960 để đáp lại sự phát triển của tàu ngầm chạy bằng năng lượng hạt nhân của Liên Xô.
Sử dụng hiện tại của các mảng kéo
Trên các tàu mặt nước, dàn cáp kéo thường được cất trong các thùng phuy, sau đó được cuộn ra phía sau tàu khi sử dụng. Các tàu ngầm của Hải quân Hoa Kỳ thường lưu trữ các mảng kéo bên trong một ống bên ngoài, được gắn dọc theo thân tàu, với một lỗ mở ở đuôi bên phải. Ngoài ra còn có thiết bị nằm trong két dằn (khu vực ngập nước tự do) trong khi thiết bị vận hành hệ thống nằm bên trong tàu ngầm.
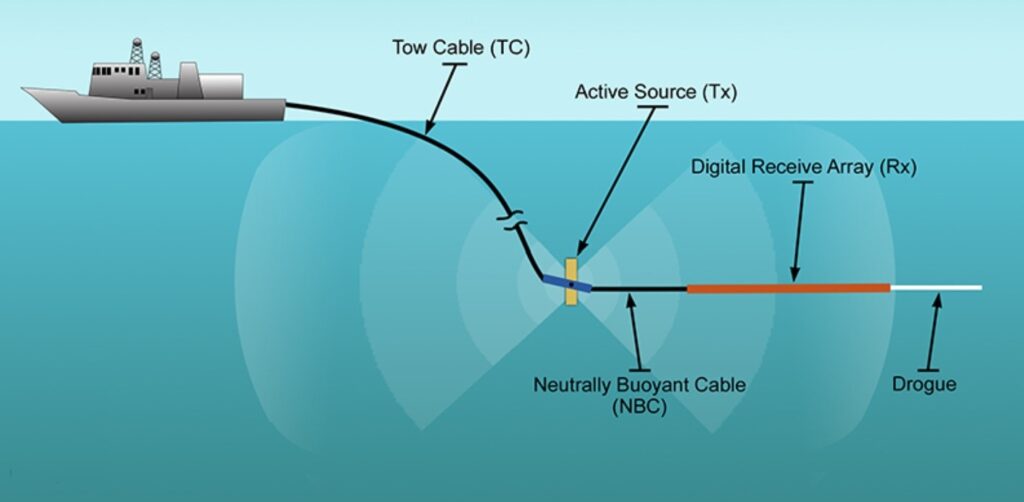
Các hydrophone (ống nghe) trong hệ thống mảng kéo được đặt ở những khoảng cách cụ thể dọc theo cáp, các phần tử đầu cuối cách nhau đủ xa để đạt được khả năng cơ bản là tạo tam giác trên nguồn âm thanh. Tương tự, các phần tử khác nhau được đặt nghiêng lên hoặc xuống tạo khả năng lập tam giác độ sâu theo chiều dọc ước tính của mục tiêu. Ngoài ra, ba hoặc nhiều mảng được sử dụng để hỗ trợ phát hiện độ sâu.
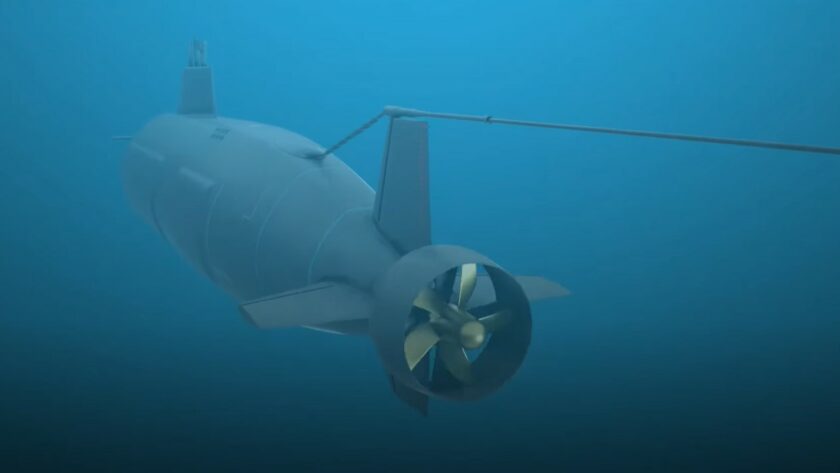
Trong vài trăm mét đầu tiên từ chân vịt của tàu thường không có ống nghe dưới nước, vì hiệu quả của chúng sẽ bị giảm do tiếng ồn (tiếng ồn tạo bọt khí và dòng chảy thân tàu), rung động và nhiễu loạn do động cơ đẩy tạo ra – điều này sẽ lặp lại các vấn đề tương tự của động cơ với mảng gắn trên tàu. Hệ thống cảm biến mảng kéo theo giám sát được sử dụng bởi các tàu mặt nước có mảng sonar được gắn trên dây cáp, kéo theo phương tiện điều khiển từ xa (ROV) có thể điều chỉnh độ sâu. Một dây cáp có trọng lượng khác có thể trượt khỏi đầu nối ROV, hạ mảng được kéo xuống độ sâu thấp hơn. Các bộ phát sóng địa chấn dài có các paravan trung gian dọc theo chiều dài của chúng có thể được sử dụng để điều chỉnh độ sâu của mảng trong thời gian thực.
Việc thay đổi độ sâu của ROV cho phép triển khai mảng kéo trong các lớp nhiệt khác nhau, giúp tàu tác chiến chống ngầm (ASW) trên mặt nước có thể quan sát bên trên và bên dưới lớp này. Điều này bù đắp cho sự khác biệt về mật độ và nhiệt độ, dẫn âm thanh bên trên hoặc bên dưới lớp nhiệt bằng cách phản xạ. Bằng cách thả “đuôi” của mảng bên dưới lớp, nền tảng ASW bề mặt có thể phát hiện tốt hơn một tiếp xúc chìm, yên tĩnh ẩn trong nước lạnh bên dưới lớp ấm phía trên. Tương tự như vậy, một chiếc tàu ngầm có thể theo dõi các tàu chiến trên mặt nước bằng cách thả phần đuôi dàn trận của nó lên trên một lớp nhiệt trong khi ẩn nấp bên dưới.
Các ống nghe dưới nước của mảng có thể được sử dụng để phát hiện các nguồn âm thanh, nhưng giá trị thực của mảng là kỹ thuật xử lý tín hiệu tạo chùm tia và phân tích Fourier không chỉ được sử dụng để tính toán khoảng cách và hướng của nguồn âm thanh mà còn để xác định loại tàu bằng dấu hiệu âm thanh đặc biệt của tiếng ồn máy móc của nó. Đối với điều này, cần phải biết vị trí tương đối của các ống nghe dưới nước, thường chỉ có thể thực hiện được khi cáp nằm trên một đường thẳng (ổn định) hoặc khi hệ thống tự cảm biến hoặc GPS hoặc các phương pháp khác được nhúng trong cáp và báo cáo vị trí tương đối của các phần tử ống nghe dưới nước, được sử dụng để theo dõi hình dạng của mảng và điều chỉnh độ cong.
Ví dụ, Hệ thống dưới nước Thales CAPTAS-2 (sonar thụ động và chủ động) nặng 16 tấn, tuyên bố phạm vi phát hiện lên tới 60 km. CAPTAS-4 nặng hơn có trọng lượng từ 20-34 tấn và tuyên bố phạm vi phát hiện lên tới 150 km.
Sử dụng trong địa vật lý
Các hệ thống mảng kéo cũng được ngành dầu khí sử dụng để thăm dò địa chấn các thành tạo địa chất dưới đáy biển. Các hệ thống được sử dụng về khái niệm tương tự như hệ thống hải quân, nhưng thường dài hơn và có nhiều bộ truyền phát hơn trong một mảng nhất định (6 hoặc nhiều hơn trong một số trường hợp). Khoảng cách giữa các ống nghe dưới nước điển hình dọc theo mỗi bộ truyền phát là khoảng 2 m và mỗi bộ truyền phát có thể dài tới 10 km. Đôi khi các bộ truyền phát được bay ở các độ cao khác nhau để tạo ra cái gọi là mảng 3D.
Hạn chế
Việc sử dụng hiệu quả hệ thống dàn mảng được lai đòi hỏi tàu phải duy trì hành trình thẳng, đều trong khoảng thời gian lấy mẫu dữ liệu. Việc điều động hoặc thay đổi hướng đi sẽ làm xáo trộn mảng và làm phức tạp quá trình phân tích luồng dữ liệu được lấy mẫu. Những khoảng thời gian không ổn định này được kiểm tra chặt chẽ trong các cuộc thử nghiệm trên biển và được các sĩ quan của thủy thủ đoàn cũng như các chuyên gia sonar nhập ngũ biết đến. Các hệ thống hiện đại bù đắp bằng cách liên tục tự đo các vị trí tương đối của mảng, phần tử này với phần tử khác, báo cáo lại dữ liệu mà máy tính có thể tự động sửa độ cong như một phần của quá trình xử lý toán học định dạng tia.
Một con tàu cũng phải giới hạn tốc độ tối đa tổng thể của nó trong khi dàn trận kéo được triển khai. Lực cản thủy động tăng theo hàm bình phương của vận tốc và có thể làm đứt cáp hoặc làm hỏng phần cứng neo của nó. Ngoài ra, tốc độ tối thiểu có thể phải được thiết lập tùy thuộc vào độ nổi của mảng được kéo (mảng quân sự được dằn để chìm xuống, mảng địa vật lý được cho là nổi trung tính ở khoảng 10 m). Mảng này cũng có thể bị hư hỏng do tiếp xúc với đáy biển hoặc nếu tàu vận hành lực đẩy phía sau, hoặc thậm chí có thể bị hư hỏng nếu nó uốn cong quá chặt./.


