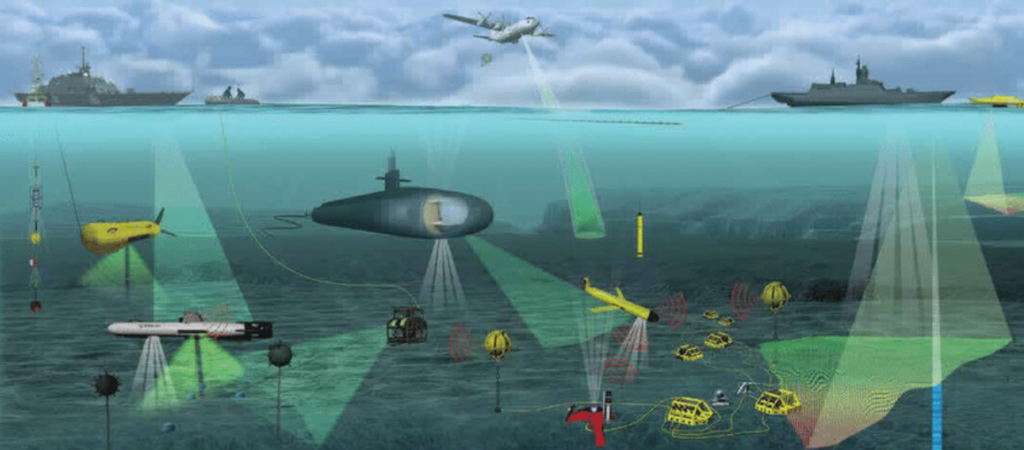
Phương tiện dưới nước không người lái UUV (Unmanned Underwater Vehicle), đôi khi được gọi là underwater drones, là phương tiện lặn có thể hoạt động dưới nước mà không cần có người điều khiển. Những phương tiện này có thể được chia thành hai loại: phương tiện dưới nước điều khiển từ xa ROUV (remotely operated underwater vehicles) và phương tiện tự hành dưới nước AUV (autonomous underwater vehicles). ROUV được điều khiển từ xa bởi con người. AUV được tự động hóa và hoạt động độc lập với sự can thiệp trực tiếp của con người.
Phân loại
Phương tiện dưới nước điều khiển từ xa
Phương tiện hoạt động dưới nước từ xa ROUV là một phân lớp của UUV với mục đích chính là thay thế con người thực hiện các nhiệm vụ dưới nước do điều kiện khó khăn dưới nước. ROUV được thiết kế để thực hiện các nhiệm vụ giáo dục hoặc công nghiệp. Chúng được người vận hành điều khiển thủ công để thực hiện các nhiệm vụ bao gồm giám sát và tuần tra. Cấu trúc của ROUV khiến nó không thể hoạt động tự chủ. Ngoài máy ảnh, bộ truyền động và cảm biến, ROUV thường bao gồm một “bộ kẹp” (gripper) hoặc vật gì đó để kẹp vật thể. Điều này có thể làm mất đi sự phân bổ trọng lượng của phương tiện và luôn cần có sự hỗ trợ bằng tay. Đôi khi ROUV yêu cầu hỗ trợ thêm do tầm quan trọng của nhiệm vụ đang được thực hiện. Hải quân Hoa Kỳ đã phát triển Hệ thống giảm áp khi lặn cứu hộ tàu ngầm SRDRS (Submarine Rescue Diving Recompression System) có thể cứu tối đa 16 người ở độ sâu tối đa trên 600 m dưới nước cùng một lúc. Một phương tiện lớn như vậy với vai trò chính là cứu mạng đòi hỏi (những) người điều khiển phải có mặt trong suốt nhiệm vụ của nó.
Phương tiện tự hành dưới nước
Phương tiện tự hành dưới nước AUV (Autonomous Underwater Vehicles) được định nghĩa là phương tiện dưới nước có thể hoạt động mà không cần con người điều khiển. Kích thước có thể dao động từ vài kg đến hàng nghìn kg. AUV đầu tiên được tạo ra vào năm 1957 với mục đích thực hiện nghiên cứu ở vùng biển Bắc Cực cho Phòng thí nghiệm tiến sĩ ứng dụng tại Đại học Washington. Vào đầu những năm 2000, 10 loại AUV khác nhau đã được phát triển như AUV điều khiển bằng chân vịt, tàu lượn dưới nước và AUV Bionic. Các mẫu đầu tiên sử dụng bộ đẩy chân vịt trục vít trong khi các mẫu gần đây hơn sử dụng điều khiển độ nổi tự động. Mẫu đầu tiên, SPURV, nặng 484 kg, lặn sâu tới 3.650 m và có thể di chuyển trong 5,5 giờ. Một trong những mẫu gần đây nhất, Deepglider, nặng 62 kg, có thể đi sâu tới 6.000 m và có thể di chuyển quãng đường lên tới 8.500 km.
Lịch sử
Thập niên 1950
Bắt đầu từ năm 1957, phương tiện dưới nước không người lái (UUV) đầu tiên được phân loại là phương tiện tự hành dưới nước (AUV) và được tạo ra ở Hoa Kỳ để nghiên cứu vùng biển Bắc Cực. Phương tiện nghiên cứu dưới nước có mục đích đặc biệt SPURV (Special Purpose Underwater Research Vehicle), được Đại học Washington sử dụng để thu thập dữ liệu hải dương học cho đến năm 1979, trong đó quá trình phát triển SPURV II bắt đầu mang lại hiệu suất chuyển động tốt hơn và khả năng cảm biến tốt hơn.
Thập niên 1970
Các nhà khoa học từ Viện Quy trình Kiểm soát và Tự động quan tâm đến sự phát triển của AUV “SCAT”, dẫn đến sự ra đời của UUV “L1” và “L2” vào năm 1974. “L1” và “L2” là các mẫu AUV được sử dụng cho phát triển hơn nữa công nghệ và lập bản đồ hải dương học.
Thập niên 1980
Sự phát triển tiếp theo của Phương tiện điều khiển từ xa (ROV) đã dẫn đến việc tạo ra Tàu ngầm tự động và điều khiển từ xa ARCS (Autonomous and Remote Controlled Submarine) vào năm 1983 bởi ISE Ltd. công ty hợp tác với “Kỹ thuật tàu ngầm quốc tế”. ARCS cũng được phân loại là phương tiện dưới nước được điều khiển từ xa (ROUV) vì bộ xử lý Motorola 32 bit cho phép điều khiển từ xa mà nó có. Chiếc UUV này tiếp tục đóng vai trò là một nền tảng thử nghiệm, cải thiện thời lượng pin, hệ thống định vị và liên lạc trong lần lặn đầu tiên vào năm 1987.
Thập niên 1990
Khi Viện các vấn đề công nghệ hàng hải của Nga giới thiệu phương tiện dưới nước tự động sử dụng năng lượng mặt trời SAUV (Solar Autonomous Underwater Vehicle), đây là sự khởi đầu cho các sứ mệnh thăm dò dài hạn hơn mà không cần phải lấy UUV để bảo trì. Việc sử dụng các tấm pin mặt trời trên UUV bắt đầu với SAUV vào năm 1987 và được duy trì trong quá trình chế tạo SAUV II. Các tấm pin mặt trời cho phép thực hiện các nhiệm vụ dài hơn, với khả năng sử dụng các tính năng như GPS và tải trọng cao thường xuyên hơn do dễ sạc.
Những tiến bộ về thời lượng pin đã cho phép tạo ra “tàu lượn” (gliders) vào năm 1995, cho phép thực hiện các chuyến lặn dài hạn trong đó UUV sẽ chìm trong nước hàng tuần hoặc thậm chí hàng tháng mỗi lần.
Thập niên 2000
UUV bắt đầu được xem xét nhiều hơn là các công cụ thử nghiệm cho các nhiệm vụ dưới nước khác do số lượng người dùng trên phạm vi Quốc tế ngày càng tăng. Ngoài ra còn có sự gia tăng tài trợ cho việc phát triển công nghệ UUV. Sự gia tăng số lượng người dùng trên toàn thế giới đã dẫn đến nhu cầu về công nghệ UUV bên ngoài các cơ quan chính phủ ngày càng tăng và việc bán UUV thương mại bắt đầu, mở rộng việc sử dụng UUV dựa trên nghiên cứu sang mục đích sử dụng dựa trên công nghiệp/thương mại hơn.
Sự cố năm 2016
Vào ngày 16/12/2016, một tàu chiến Trung Quốc ở Biển Đông đã bắt giữ một máy bay không người lái dưới nước đang trong quá trình được tàu khảo sát USNS Bowditch của Hải quân Hoa Kỳ trục vớt. Một ngày sau, Bộ Quốc phòng Trung Quốc cho biết họ sẽ trả lại máy bay không người lái cho Hoa Kỳ. Lầu Năm Góc xác nhận điều đó và cho biết máy bay không người lái, được sử dụng để thu thập dữ liệu thời tiết và nhiệt độ, không được trang bị vũ khí. Máy bay không người lái đã được trả lại vài ngày sau đó.
Thập niên 2020
Vào đầu năm 2023, sau khi Ukraine sử dụng thành công các phương tiện mặt nước không người lái USV (Uncrewed Surface Vehicles) ở Biển Đen vào tháng 10 và tháng 11/2022, Hải quân Ukraine bắt đầu sử dụng một phương tiện dưới nước không người lái (UUV), một máy bay không người lái hàng hải, được gọi là Toloka TLK-150. Là một tàu ngầm robot nhỏ, TLK-150 dài 2,5 m, với bộ đẩy đôi gắn trên bộ ổn định giống như cánh. Mặc dù “nhỏ hơn các phương tiện không người lái hàng hải trước đây của Ukraine và với tầm bay ngắn hơn nhiều và tốc độ chậm hơn, nhưng nó sẽ bù đắp cho điều đó bằng khả năng tàng hình và khả năng sống sót cao hơn.
TLK-150 được phát triển bởi Brave1, có thiết kế cho hai UUV lớn hơn. TLK-400 dài hơn ở mức 4-6 m và “có thân có đường kính lớn hơn nhiều dẫn đến tầm hoạt động và tải trọng lớn hơn. TLK-1000 sẽ lại lớn hơn nhiều, lên tới 12 m trong chiều dài và với bốn động cơ đẩy”.
Thiết kế
Tàu lượn (Gliders)
Các cánh bên ngoài vuông góc với khung của UUV cho phép UUV chuyển động tuyến tính và lặn sâu hơn, có kiểm soát. Những tàu lượn này sử dụng lực đẩy có nguồn gốc từ sức nổi giúp tăng thời gian lặn và phạm vi lặn thông qua chuyển động lên xuống trong đại dương.
Tia manta
Vào tháng 9/2021, các nhà nghiên cứu tại một trường đại học Trung Quốc đã phát triển UUV hình cá đuối với mục đích thu thập thông tin xung quanh quần đảo Hoàng Sa. Một số UUV được thiết kế để bắt chước hình bóng của động vật nhằm tạo điều kiện thuận lợi cho việc di chuyển và ngăn chặn việc bị phát hiện. Thiết kế tia manta cho phép UUV ngụy trang với sinh vật biển và góp phần giúp tàu dễ dàng bơi trong nước.
Động cơ đẩy độc lập với không khí oxy/hydro
UUV là phương tiện phụ thuộc vào oxy cần phải nổi lên trở lại. Với sự phát triển của bộ phận đẩy không cần oxy hoặc hydro, khả năng UUV hoạt động liên tục dưới nước sẽ tăng lên đáng kể.
Nguồn năng lượng lithium và nước
Nguồn năng lượng mới nhất cho UUV có thể là phản ứng năng lượng tự do của Lithium/nước vì nó tạo ra 8530 Wh/kg. 5% năng lượng này sẽ vượt qua các nguồn mật độ năng lượng đã được thiết lập sẵn trong các UUV ngày nay. Về cơ bản, nguồn năng lượng sẽ tiêu thụ nước xung quanh UUV và điều khiển nó để tạo ra năng lượng thông qua các phản ứng hóa học cung cấp năng lượng cho UUV.
Các ứng dụng
Quân đội
Hải quân Hoa Kỳ bắt đầu sử dụng UUV từ những năm 1990 để phát hiện và vô hiệu hóa mìn dưới nước. UUV đã được Hải quân Hoa Kỳ sử dụng trong Chiến tranh Iraq vào những năm 2010 để gỡ mìn xung quanh Umm Qasr, một cảng ở miền nam Iraq.
Quân đội Trung Quốc sử dụng UUV cho mục đích chủ yếu là thu thập dữ liệu và trinh sát.
Vào ngày 20/12/2020, một ngư dân ở Indonesia đã phát hiện một UUV hình tàu lượn gần Đảo Selayar ở Nam Sulawesi. Các cá nhân từ quân đội Indonesia đã phân loại phương tiện này là Sea Wing của Trung Quốc (Haiyi), được tạo ra với mục đích thu thập dữ liệu bao gồm nhiệt độ nước, độ mặn, độ đục và nồng độ oxy có thể giúp lập biểu đồ các tuyến đường tàu ngầm tối ưu.
Hải quân của nhiều quốc gia, bao gồm Mỹ, Anh, Pháp, Nga và Trung Quốc hiện đang chế tạo các phương tiện không người lái để sử dụng trong chiến tranh trên biển nhằm phát hiện và phá hủy mìn dưới nước. Ví dụ, REMUS là một robot dài 3 foot được sử dụng để rà phá bom mìn trong phạm vi một dặm vuông trong vòng 16 giờ. Điều này hiệu quả hơn nhiều vì một nhóm thợ lặn sẽ cần tới 21 ngày để thực hiện cùng một nhiệm vụ.
Một cuộc khảo sát do RAND Corporation thực hiện cho quân đội Hoa Kỳ đã phân tích các nhiệm vụ mà phương tiện không người lái dưới nước có thể thực hiện, bao gồm tình báo, trinh sát, biện pháp đối phó với mìn và tác chiến tàu ngầm. Đánh giá đã liệt kê những điều này từ quan trọng nhất đến ít quan trọng nhất.
OODA Technologies, một công ty thu thập và phân tích dữ liệu, rất quan tâm đến việc sử dụng UUV dọc theo bờ biển Canada. Theo OODA, những chiếc máy bay không người lái này cung cấp phạm vi bao phủ rộng hơn trên một khu vực với chi phí thấp hơn nhiều so với các máy bay có người lái. Chất lượng dữ liệu do tàu biển không người lái trả về cũng được cho là cao hơn nhiều so với tàu có người lái truyền thống.
Vào tháng 11/2022, Thời báo Á-Âu đưa tin rằng Đại học Kỹ thuật Cáp Nhĩ Tân của Trung Quốc đã phát triển phương tiện không người lái “tàu ngầm bay” (flying submarine) tầm trung có khả năng di chuyển cả dưới nước và trên không, đồng thời lưu ý đến các ứng dụng quân sự tiềm năng của phương tiện này.
Triển khai
Những ví dụ về ứng dụng này diễn ra trong cuộc tập trận Công nghệ hải quân tiên tiến năm 2018, vào tháng 8 tại Phân khu Trung tâm tác chiến dưới biển hải quân Newport. Ví dụ đầu tiên về phương tiện không người lái dưới nước được Northrop Grumman trưng bày với phao siêu âm thả từ máy bay trinh sát cứu hỏa. Trong suốt cuộc trình diễn, công ty đã sử dụng: e Iver3-580 (Northrop Grumman AUV) để thể hiện khả năng quét mìn của phương tiện của họ, đồng thời hiển thị hệ thống nhận dạng mục tiêu tự động theo thời gian thực của họ. Một công ty khác, Huntington Ingalls Industries, đã giới thiệu phiên bản của phương tiện dưới nước không người lái có tên Proteus. Proteus là phương tiện dưới biển hai chế độ được phát triển bởi Huntington và Battelle, công ty trong buổi thuyết trình đã thể hiện khả năng của phương tiện không người lái dưới nước bằng cách thực hiện màn trình diễn toàn diện về chiến tranh dưới đáy biển. Trong quá trình trình diễn, chiếc xe đã sử dụng một sonar khẩu độ tổng hợp được gắn vào cả mạn phải và mạn trái của tàu, cho phép phương tiện dưới nước không người lái xác định các mục tiêu được đặt dưới nước và cuối cùng loại bỏ chúng. Ross Lindman (giám đốc điều hành nhóm hỗ trợ đội xe giải pháp kỹ thuật của công ty) tuyên bố rằng “Ý nghĩa lớn của việc này là chúng tôi đã vận hành toàn bộ chuỗi tiêu diệt”. “Chúng tôi đã chạy một phiên bản rút gọn của một nhiệm vụ thực tế. Chúng tôi không nói, “Ồ, chúng tôi đang thực hiện phần này và bạn phải tưởng tượng điều này hay điều kia. Chúng tôi đã chạy toàn bộ để minh họa một khả năng có thể được sử dụng trong thời gian tới”. Buổi trình diễn cuối cùng về phương tiện dưới nước không người lái đã được trưng bày bởi General Dynamics, công ty đã giới thiệu UUV đa nền tảng xuyên miền của họ thông qua một công cụ lập kế hoạch chiến tranh mô phỏng nhà hát. Thông qua việc sử dụng mô phỏng này, họ đã cho thấy một tàu chiến Littoral cùng với hai phương tiện dưới nước không người lái. Mục tiêu của bài tập này là để chứng minh tốc độ liên lạc giữa người điều khiển và UUV. James Langevin, DR.I., thành viên cấp cao trong tiểu ban của Ủy ban Dịch vụ Vũ trang Hạ viện về các mối đe dọa mới nổi, đã phát biểu về hoạt động này “Tất cả những điều này thúc đẩy việc chỉ huy chiến tranh có thể đưa ra các quyết định dựa trên những gì nó nghĩ là thông tin đầu vào có độ tin cậy cao nhanh hơn đối thủ của nó có thể”, ông này nói. “Đó là mục tiêu – chúng tôi muốn có thể… để họ đưa ra các quyết định liên quan đến chiến tranh nhanh hơn bất kỳ ai khác ngoài kia”. Những cuộc tập trận này được tiến hành để giới thiệu các ứng dụng của phương tiện không người lái dưới nước trong cộng đồng quân sự,
Công dụng đối với phim ảnh
UUV cũng được sử dụng để quay một bộ phim tài liệu gần đây của National Geographic có tên “Bí mật đen tối” về Lusitania, con tàu viễn dương của Anh bị quân Đức đánh chìm trong Thế chiến I. Để ghi lại cảnh xác tàu đắm, nhóm quay phim đã sử dụng kết hợp tàu ngầm, phương tiện dưới nước điều khiển từ xa (ROUV) và bộ quần áo dưới nước có tên Newtsuits.
Argo, một UUV do Viện Hải dương học Woods Hole (WHOI) phát triển, đã giúp tìm ra xác tàu Titanic và được trang bị một bộ camera truyền hình để ghi lại quang cảnh của con tàu. Phương tiện này có khả năng quay phim góc rộng và phóng to để nhìn cận cảnh đống đổ nát. Đoạn phim do Argo ghi lại đã được đưa vào bộ phim tài liệu Bí mật của tàu Titanic năm 1986 của National Geographic kể chi tiết về chuyến thám hiểm do Tiến sĩ Robber Ballard dẫn đầu và cho phép người xem xem xét kỹ hơn đống đổ nát của con tàu.
Thăm dò và nghiên cứu biển sâu
Phương tiện dưới nước không người lái có thể được sử dụng để thăm dò và nghiên cứu biển sâu. Ví dụ, các phương tiện vận hành từ xa đã được sử dụng để thu thập các mẫu từ đáy biển để đo hàm lượng vi nhựa, để khám phá hệ động vật và cấu trúc dưới biển sâu cũng như phát hiện các loài mới dưới nước.
UUV thường được sử dụng trong nghiên cứu đại dương, cho các mục đích như đo dòng điện và nhiệt độ, lập bản đồ đáy đại dương và phát hiện miệng phun thủy nhiệt. Phương tiện dưới nước không người lái sử dụng bản đồ đáy biển, đo độ sâu, máy ảnh kỹ thuật số, cảm biến từ tính và hình ảnh siêu âm.
Viện Hải dương học Woods Hole sử dụng một phương tiện tên là Sentry, được thiết kế để lập bản đồ đáy đại dương ở độ sâu 6.000 m. Phương tiện được thiết kế để giảm thiểu khả năng chống nước trong quá trình lặn và sử dụng hệ thống liên lạc âm thanh để báo cáo tình trạng phương tiện khi vận hành. Phương tiện dưới nước không người lái có khả năng ghi lại các điều kiện và địa hình dưới lớp băng trên biển, vì nguy cơ khiến phương tiện không người lái rơi vào vùng băng không ổn định thấp hơn nhiều so với tàu có người lái. Các phương tiện không người lái kiểu tàu lượn thường được sử dụng để đo nhiệt độ đại dương và cường độ dòng chảy ở nhiều độ sâu khác nhau. Tính đơn giản và chi phí vận hành giảm cho phép triển khai nhiều UUV hơn với tần suất cao hơn, tăng độ chính xác và chi tiết của báo cáo thời tiết đại dương. Nhiều UUV được thiết kế với mục đích thu thập mẫu hoặc hình ảnh đáy biển thuộc loại được kéo, bị kéo bởi dây cáp của tàu dọc theo đáy biển hoặc phía trên. Xe kéo có thể được chọn cho các nhiệm vụ đòi hỏi lượng điện năng và truyền dữ liệu lớn, chẳng hạn như thử nghiệm mẫu và chụp ảnh độ phân giải cao, vì cáp kéo của chúng đóng vai trò là phương thức liên lạc giữa bộ điều khiển và tàu. Vào năm 2021, các nhà khoa học đã chứng minh một robot mềm tự cấp năng lượng lấy cảm hứng từ sinh học để hoạt động ở vùng biển sâu có thể chịu được áp lực ở phần sâu nhất của đại dương tại Rãnh Mariana. Robot có cơ và cánh nhân tạo làm từ vật liệu dẻo và thiết bị điện tử được phân bố bên trong thân silicon của nó và có thể được sử dụng để thăm dò và giám sát môi trường.
Science Direct tuyên bố việc sử dụng Phương tiện không người lái dưới nước đã tăng lên liên tục kể từ khi chúng được giới thiệu vào những năm 1960 và nhận thấy chúng được sử dụng thường xuyên nhất trong nghiên cứu khoa học và thu thập dữ liệu. Oceanservice mô tả Phương tiện điều khiển từ xa (ROV) và Phương tiện tự hành dưới nước (AUV) là hai biến thể của UUV, mỗi biến thể có thể hoàn thành các nhiệm vụ giống nhau, miễn là phương tiện được thiết kế phù hợp.
Phục hồi hệ sinh thái
Các công ty như Duro AUS cung cấp UUV có thể thu thập và truyền dữ liệu nước từ xa cho chính quyền địa phương. Duro giúp chính quyền Thành phố New York thu thập dữ liệu xung quanh Randall’s Island Park Alliance để giám sát chất lượng nước và tình trạng đất ngập nước ở sông Đông và sông Harlem. Một dự án khác mà Duro đang thực hiện là kết hợp với Liên minh sông Bronx để giúp trẻ hóa đời sống hoang dã trên sông. Bằng cách sử dụng dữ liệu này, chính quyền tiểu bang và địa phương đã đưa ra những quyết định quan trọng liên quan đến các chính sách trong Kế hoạch hành động về Đại dương của New York đối với các đại dương, sông và cửa sông lân cận.
Mối quan tâm
Mối quan tâm lớn nhất với các phương tiện không người lái dưới nước là thông tin liên lạc. Giao tiếp giữa người điều khiển và phương tiện không người lái là rất quan trọng, tuy nhiên có nhiều yếu tố cản trở sự kết nối giữa hai bên. Một trong những vấn đề chính liên quan đến sự biến dạng của đường truyền dưới nước, bởi vì nước có thể làm biến dạng đường truyền dưới nước và làm chậm chúng, đây có thể là một vấn đề rất lớn trong một nhiệm vụ nhạy cảm về thời gian. Thông tin liên lạc thường bị nhiễu do thực tế là các phương tiện không người lái dưới nước sử dụng sóng âm thay vì sóng điện từ thông thường. Sóng âm quá trình truyền thường bị trễ trong khoảng 1-2 giây vì chúng di chuyển chậm hơn các loại sóng khác. Các điều kiện môi trường khác cũng có thể cản trở việc liên lạc như phản xạ, khúc xạ và hấp thụ tín hiệu. Những hiện tượng dưới nước này nhìn chung sẽ phân tán và làm suy giảm tín hiệu, khiến hệ thống liên lạc UUV khá chậm khi so sánh với các nguồn liên lạc khác. Một hệ thống khác sử dụng sóng âm được tìm thấy trong việc điều hướng các phương tiện không người lái này. Một hệ thống định vị phổ biến trên các phương tiện không người lái dưới nước này là định vị bằng âm thanh, hệ thống này cũng gặp phải những vấn đề tương tự như liên lạc bằng âm thanh vì chúng sử dụng cùng một hệ thống. Hải quân Hoàng gia Hà Lan đã xuất bản một bài báo nêu chi tiết mối quan tâm của họ xung quanh các phương tiện hàng hải không người lái. Hải quân Hoàng gia Hà Lan đặc biệt quan ngại về khả năng UUV tránh bị phát hiện và hoàn thành các nhiệm vụ không thể thực hiện được trên tàu có người lái. Khả năng thích ứng và tiện ích của phương tiện không người lái dưới nước đồng nghĩa với việc sẽ khó dự đoán và chống lại các hành động trong tương lai của chúng. Trong vài năm qua, các dự án như TWINBOT đang phát triển các phương thức liên lạc mới giữa một số GIRONA500 AUV./.



