Cùng với RADAR, SONAR ngày này không ai còn để ý đến ngữ nghĩa ban đầu của chúng nữa, nó trở thành một phương tiện, trở thành tên gọi đặc trưng và phổ biến (radar, sonar) và hầu hết các ngôn ngữ, thường thì người ta không dịch, không phiên âm, không giải nghĩa nữa. Ở đây, bài viết đi sâu hơn, giúp những ai làm chuyên ngành liên quan có cái nhìn tổng thể và toàn diện hơn.
SONAR, là cụm từ viết tắt của “Sound Navigation And Ranging” hoặc “Sonic Navigation And Ranging” (điều hướng và xác định phạm vi bằng âm thanh) là một kỹ thuật sử dụng sự lan truyền âm thanh (thường là dưới nước, như trong điều hướng tàu ngầm) để điều hướng, đo khoảng cách (phạm vi), giao tiếp hoặc phát hiện các vật thể trên hoặc dưới mặt nước, chẳng hạn như các tàu khác.
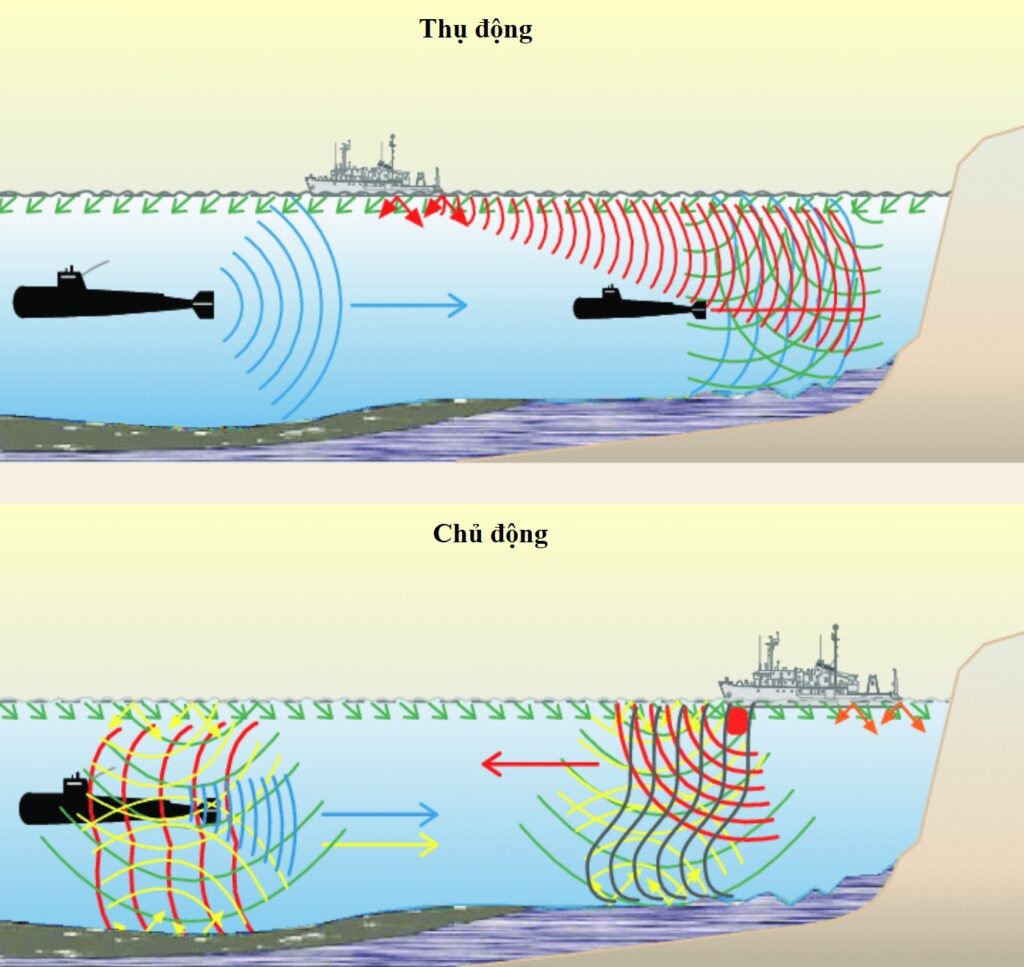
“Sonar” có thể đề cập đến một trong hai loại công nghệ: sonar thụ động có nghĩa là lắng nghe âm thanh do tàu mục tiêu tạo ra; sonar chủ động có nghĩa là phát ra các xung âm thanh và lắng nghe tiếng vang (âm thanh dội lại khi xung phát đi tiếp xúc với mục tiêu). Sonar có thể được sử dụng như một phương tiện xác định vị trí âm thanh và đo lường các đặc tính tiếng vang của “mục tiêu” trong nước. Vị trí âm thanh trong không khí đã được sử dụng trước khi giới thiệu radar. Sonar cũng có thể được sử dụng để điều hướng robot và SODAR (sonic detection and ranging) – một sonar trong không khí hướng lên trên được sử dụng để điều tra khí quyển. Thuật ngữ sonar cũng được sử dụng cho thiết bị được sử dụng để phát và thu nhận âm thanh. Các tần số âm thanh được sử dụng trong các hệ thống sonar thay đổi từ rất thấp (hạ âm) đến cực cao (siêu âm). Nghiên cứu về âm thanh dưới nước được gọi là âm học dưới nước (underwater acoustics) hoặc thủy âm học (hydroacoustics).
Lần đầu tiên sử dụng kỹ thuật này được ghi lại là của Leonardo da Vinci vào năm 1490, người đã sử dụng một ống nghe cắm vào nước để phát hiện các mạch bằng tai. Nó được phát triển trong Thế chiến I để chống lại mối đe dọa ngày càng tăng của tác chiến tàu ngầm, với hệ thống sonar thụ động hoạt động được sử dụng vào năm 1918. Các hệ thống sonar chủ động hiện đại sử dụng bộ chuyển đổi âm thanh để tạo ra sóng âm phản xạ từ các vật thể mục tiêu.
Lịch sử
Mặc dù một số động vật (cá heo, dơi, một số chuột chù và những loài khác) đã sử dụng âm thanh để liên lạc và phát hiện vật thể trong hàng triệu năm, nhưng việc con người sử dụng dưới nước lần đầu tiên được ghi lại bởi Leonardo da Vinci vào năm 1490 (như đã nói ở trên).
Vào cuối thế kỷ XIX, một chiếc chuông dưới nước đã được sử dụng như một thiết bị phụ cho các ngọn hải đăng hoặc tàu đèn để cảnh báo các mối nguy hiểm.
Việc sử dụng âm thanh để “định vị bằng tiếng vang” dưới nước giống như cách loài dơi sử dụng âm thanh để điều hướng trên không dường như đã được thúc đẩy bởi thảm họa Titanic năm 1912. Bằng sáng chế đầu tiên trên thế giới cho thiết bị định vị bằng tiếng vang dưới nước đã được nộp tại Viện bảo tàng Anh quốc. Văn phòng Bằng sáng chế của nhà khí tượng học người Anh Lewis Fry Richardson một tháng sau vụ chìm tàu Titanic, và nhà vật lý người Đức Alexander Behm đã nhận được bằng sáng chế cho thiết bị đo tiếng vang vào năm 1913.
Kỹ sư người Canada Reginald Fessenden, khi đang làm việc cho Công ty Tín hiệu Tàu ngầm ở Boston, Massachusetts, đã xây dựng một hệ thống thử nghiệm bắt đầu từ năm 1912, một hệ thống sau đó được thử nghiệm ở Cảng Boston và cuối cùng là vào năm 1914 từ US Revenue Cutter Miami trên Grand Banks ngoài khơi Newfoundland. Trong thử nghiệm đó, Fessenden đã trình diễn khả năng đo độ sâu, thông tin liên lạc dưới nước (mã Morse) và phạm vi tiếng vang (phát hiện một tảng băng trôi ở phạm vi hơn 3 km). “Bộ tạo dao động Fessenden”, hoạt động ở khoảng tần số 500 Hz, không thể xác định phương hướng của tảng băng trôi do bước sóng 3 m và kích thước nhỏ của mặt bức xạ của đầu dò (đường kính nhỏ hơn 1⁄3 bước sóng). Mười chiếc tàu ngầm lớp H do Anh chế tạo ở Montreal hạ thủy năm 1915 được trang bị bộ tạo dao động Fessenden.
Trong Thế chiến I, nhu cầu phát hiện tàu ngầm đã thúc đẩy nhiều nghiên cứu hơn về việc sử dụng âm thanh. Người Anh đã sớm sử dụng các thiết bị nghe dưới nước gọi là hydrophone, trong khi nhà vật lý người Pháp Paul Langevin, làm việc với một kỹ sư điện nhập cư người Nga Constantin Chilowsky, đã nghiên cứu phát triển các thiết bị âm thanh chủ động để phát hiện tàu ngầm vào năm 1915. Mặc dù các bộ chuyển đổi áp điện và từ giảo sau đó đã được thay thế đầu dò tĩnh điện mà họ đã sử dụng, công việc này đã ảnh hưởng đến các thiết kế trong tương lai. Màng nhựa nhẹ và sợi quang nhạy cảm với âm thanh đã được sử dụng cho điện thoại dưới nước, trong khi Terfenol-D và chì niobat magie PMN (lead magnesium niobate) đã được phát triển cho máy chiếu.
ASDIC
Năm 1916, dưới sự quản lý của Hội đồng Phát minh và Nghiên cứu Anh, nhà vật lý người Canada Robert William Boyle đã tham gia dự án phát hiện âm thanh tích cực với AB Wood, tạo ra một nguyên mẫu để thử nghiệm vào giữa năm 1917. Công việc này cho Bộ phận chống tàu ngầm của Bộ tham mưu Hải quân Anh được thực hiện trong bí mật tối đa và sử dụng các tinh thể áp điện thạch anh để sản xuất thiết bị phát hiện âm thanh hoạt động dưới nước thực tế đầu tiên trên thế giới. Để giữ bí mật, không đề cập đến thử nghiệm âm thanh hoặc thạch anh – từ được sử dụng để mô tả công việc ban đầu “supersonics” (siêu âm) đã được đổi thành “ASD”ics và vật liệu thạch anh thành “ASD”ivite: “ASD”, viết tắt của “Anti-Submarine Division” nghĩa là “Sư đoàn chống ngầm”. Năm 1939, để trả lời một câu hỏi từ Từ điển tiếng Anh Oxford, Bộ Hải quân đã bịa ra câu chuyện rằng nó là viết tắt của “Allied Submarine Detection Investigation Committee” (Ủy ban Điều tra Phát hiện Tàu ngầm Đồng minh), và điều này vẫn được nhiều người tin tưởng, mặc dù không có ủy ban nào mang tên này được tìm thấy trong Kho lưu trữ Hạm đội.
Đến năm 1918, Anh và Pháp đã chế tạo các hệ thống hoạt động nguyên mẫu. Người Anh đã thử nghiệm ASDIC của họ trên HMS Antrim vào năm 1920 và bắt đầu sản xuất vào năm 1922. Chi hạm đội Khu trục 6 có các tàu được trang bị ASDIC vào năm 1923. Một trường dạy chống ngầm HMS Osprey và một đội huấn luyện gồm 4 tàu được thành lập tại Portland vào năm 1924.
Khi Thế chiến II bùng nổ, Hải quân Hoàng gia Anh (RN) có năm bộ dành cho các lớp tàu mặt nước khác nhau và những bộ khác dành cho tàu ngầm, được tích hợp thành một hệ thống chống ngầm hoàn chỉnh. Hiệu quả của ASDIC ban đầu bị cản trở do việc sử dụng lượng nổ ngầm làm vũ khí chống ngầm. Điều này yêu cầu tàu tấn công phải vượt qua điểm tiếp xúc chìm trước khi thả lượng nổ qua đuôi tàu, dẫn đến mất liên lạc ASDIC trong thời điểm chuẩn bị tấn công, là lúc tàu săn ngầm tạo ra vùng mù cho mình, nên trong thời gian đó, chỉ huy tàu ngầm mục tiêu có thể thực hiện hành động né tránh. Tình trạng này đã được khắc phục bằng các chiến thuật mới và vũ khí mới.
Những cải tiến chiến thuật được phát triển bởi Frederic John Walkerbao gồm các cuộc tấn công leo thang (creeping attack). Hai tàu chống ngầm là cần thiết cho việc này (thường là tàu chiến kiểu sloop hoặc tàu hộ vệ). “Tàu chỉ đạo” theo dõi tàu ngầm mục tiêu trên ASDIC từ vị trí phía sau tàu ngầm khoảng 1500 đến 2000 thước Anh. Con tàu thứ hai, đã tắt ASDIC và chạy với tốc độ 5 hl/g, bắt đầu tấn công từ vị trí giữa tàu chỉ đạo và mục tiêu. Cuộc tấn công này được điều khiển bằng điện thoại vô tuyến từ tàu chỉ đạo, dựa trên ASDIC của chúng và phạm vi (bằng máy đo khoảng cách) và phương hướng của tàu tấn công. Ngay sau khi thả lượng nổ ngầm, con tàu tấn công rời khỏi khu vực ngay lập tức với tốc độ tối đa. Sau đó, con tàu chỉ đạo đi vào khu vực mục tiêu và cũng phóng ra một loại lượng nổ ngầm. Tốc độ tiếp cận thấp có nghĩa là tàu ngầm không thể dự đoán khi nào lượng nổ ngầm sẽ được phóng, ném. Bất kỳ hành động trốn tránh nào đều bị phát hiện bởi tàu chỉ đạo và lệnh chỉ đạo cho tàu tấn công được đưa ra tương ứng. Tốc độ thấp của cuộc tấn công có lợi thế là ngư lôi âm thanh của Đức không hiệu quả đối với một tàu chiến di chuyển quá chậm. Một biến thể của cuộc tấn công leo thang là cuộc tấn công “plaster” (đắp thêm lên), trong đó ba tàu tấn công hoạt động theo hàng ngang được tàu chỉ đạo hướng tới mục tiêu.
Các vũ khí mới để đối phó với điểm mù ASDIC là “vũ khí ném về phía trước”, chẳng hạn như Hedgehogs và sau này là Squids, phóng các đầu đạn vào mục tiêu phía trước kẻ tấn công và vẫn đang tiếp xúc với ASDIC. Những điều này cho phép một tàu hộ tống duy nhất thực hiện các cuộc tấn công có mục tiêu tốt hơn vào tàu ngầm. Sự phát triển trong chiến tranh đã dẫn đến các bộ ASDIC của Anh sử dụng một số hình dạng chùm tia khác nhau, liên tục che phủ các điểm mù. Sau đó, ngư lôi âm thanh đã được sử dụng.
Đầu Thế chiến II (tháng 9/1940), công nghệ ASDIC của Anh được chuyển giao miễn phí cho Hoa Kỳ. Nghiên cứu về ASDIC và âm thanh dưới nước được mở rộng ở Anh và Mỹ. Nhiều loại phát hiện âm thanh quân sự mới đã được phát triển. Chúng bao gồm sonobuoys, lần đầu tiên được phát triển bởi người Anh vào năm 1944 với mật danh High Tea, sonar nhúng/ nhúng và sonar dò mìn. Công việc này đã hình thành cơ sở cho những phát triển sau chiến tranh liên quan đến việc chống lại tàu ngầm hạt nhân.
Sonar
Trong những năm 1930, các kỹ sư người Mỹ đã phát triển công nghệ phát hiện âm thanh dưới nước của riêng họ và những khám phá quan trọng đã được thực hiện, chẳng hạn như sự tồn tại của các dòng nhiệt và ảnh hưởng của chúng đối với sóng âm thanh. Người Mỹ bắt đầu sử dụng thuật ngữ SONAR cho các hệ thống của họ, do Frederick Hunt đặt ra để tương đương với RADAR.
Năm 1917, lần đầu tiên Hải quân Hoa Kỳ mua lại các dịch vụ của J. Warren Horton. Sau khi rời Bell Labs, ông phục vụ chính phủ với tư cách là chuyên gia kỹ thuật, đầu tiên là tại trạm thí nghiệm ở Nahant, Massachusetts, và sau đó là tại Trụ sở Hải quân Hoa Kỳ, ở London, Anh. Tại Nahant, ông đã áp dụng ống chân không mới được phát triển, sau đó được kết hợp với các giai đoạn hình thành của lĩnh vực khoa học ứng dụng hiện được gọi là điện tử, để phát hiện các tín hiệu dưới nước. Do đó, micrô nút carbon, được sử dụng trong thiết bị phát hiện trước đó, đã được thay thế bằng tiền thân của điện thoại dưới nước hiện đại. Cũng trong thời gian này, ông đã thử nghiệm các phương pháp phát hiện lai dắt. Điều này là do độ nhạy của thiết bị của ông đã tăng lên. Các nguyên tắc vẫn được sử dụng trong các hệ thống sonar kéo hiện đại.
Để đáp ứng nhu cầu phòng thủ của Vương quốc Anh, nó được đưa đến Anh để lắp đặt các ống nghe dưới đáy biển Ailen được kết nối với một trạm nghe trên bờ bằng cáp ngầm. Trong khi thiết bị này đang được chất lên tàu đặt cáp thì Thế chiến I kết thúc và Horton trở về nhà.
Trong Thế chiến II, ông tiếp tục phát triển các hệ thống sonar có thể phát hiện tàu ngầm, thủy lôi và ngư lôi. Ông đã xuất bản cuốn “Fundamentals of Sonar” (Nguyên lý cơ bản của Sonar) vào năm 1957 với tư cách là cố vấn nghiên cứu chính tại Phòng thí nghiệm âm thanh dưới nước của Hải quân Hoa Kỳ. Ông giữ chức vụ này cho đến năm 1959 khi trở thành giám đốc kỹ thuật, vị trí mà ông giữ cho đến khi nghỉ hưu bắt buộc vào năm 1963.
Chất liệu và thiết kế của Mỹ và Nhật
Có rất ít tiến bộ trong hệ thống sonar của Hoa Kỳ từ năm 1915 đến năm 1940. Năm 1940, sonar của Hoa Kỳ thường bao gồm một bộ chuyển đổi từ tính và một dãy các ống niken nối với một tấm thép có đường kính 1 foot được gắn giáp lưng với một tinh thể muối Rochelle trong một vỏ hình cầu. Cụm này xuyên qua vỏ tàu và được xoay thủ công theo góc mong muốn. Tinh thể muối Rochelle áp điện có các thông số tốt hơn, nhưng bộ phận từ giảo đáng tin cậy hơn nhiều. Tổn thất lớn đối với việc vận chuyển hàng cung cấp của các thương gia Hoa Kỳ vào đầu Thế chiến II đã dẫn đến việc Hoa Kỳ ưu tiên nghiên cứu quy mô lớn trong lĩnh vực này, theo đuổi cả hai mục tiêu cải thiện các thông số của bộ chuyển đổi từ giảo và độ tin cậy của muối Rochelle. Amoni dihydro photphat (ADP), một chất thay thế ưu việt, đã được tìm thấy để thay thế cho muối Rochelle; ứng dụng đầu tiên là thay thế bộ chuyển đổi Rochelle-salt 24 kHz. Trong vòng 9 tháng, muối Rochelle đã lỗi thời. Cơ sở sản xuất của ADP đã tăng từ vài chục nhân viên vào đầu năm 1940 lên vài nghìn nhân viên vào năm 1942.
Một trong những ứng dụng sớm nhất của tinh thể ADP là ống nghe dưới nước cho các mìn âm thanh; các tinh thể được chỉ định để cắt tần số thấp ở 5 Hz, chịu được sốc cơ học khi triển khai từ máy bay từ độ cao 3.000 m và khả năng sống sót sau các vụ nổ mìn lân cận. Một trong những tính năng chính của độ tin cậy ADP là đặc điểm lão hóa bằng không; tinh thể giữ các thông số của nó ngay cả khi lưu trữ kéo dài.
Một ứng dụng khác dành cho ngư lôi dẫn đường bằng âm thanh. Hai cặp thủy âm định hướng được gắn trên mũi ngư lôi, nằm trong mặt phẳng ngang và dọc; các tín hiệu khác biệt từ các cặp được sử dụng để điều khiển ngư lôi sang trái và phải và lên xuống. Một biện pháp đối phó đã được phát triển: chiếc tàu ngầm mục tiêu đã phóng ra một chất hóa học sủi bọt, và quả ngư lôi đuổi theo con mồi có ga ồn ào hơn. Biện pháp đối phó là một quả ngư lôi có sonar chủ động – một bộ chuyển đổi đã được thêm vào mũi ngư lôi và các micrô đang lắng nghe những tiếng nổ định kỳ phản xạ của nó. Các đầu dò bao gồm các tấm tinh thể hình chữ nhật giống hệt nhau được sắp xếp thành các khu vực hình thoi theo hàng so le.
Mảng sonar thụ động cho tàu ngầm được phát triển từ các tinh thể ADP. Một số tổ hợp tinh thể được sắp xếp trong một ống thép, chứa đầy dầu thầu dầu chân không và được niêm phong. Các ống sau đó được gắn trong các mảng song song.
Sonar quét tiêu chuẩn của Hải quân Hoa Kỳ vào cuối Thế chiến II hoạt động ở tần số 18 kHz, sử dụng một mảng tinh thể ADP. Tuy nhiên, phạm vi lớn hơn mong muốn, yêu cầu sử dụng tần số thấp hơn. Các kích thước cần thiết là quá lớn đối với các tinh thể ADP, vì vậy vào đầu những năm 1950, các hệ thống áp điện titanat bari và từ giảo đã được phát triển, nhưng những hệ thống này gặp vấn đề trong việc đạt được các đặc tính trở kháng đồng nhất và kiểu chùm tia bị ảnh hưởng. Barium titanate sau đó được thay thế bằng chì zirconate titanate (PZT) ổn định hơn và tần số được hạ xuống 5 kHz. Hạm đội Hoa Kỳ đã sử dụng vật liệu này trong sonar AN/SQS-23 trong nhiều thập kỷ. Sonar SQS-23 lần đầu tiên sử dụng các bộ chuyển đổi niken từ tính, nhưng những bộ chuyển đổi này nặng vài tấn và niken đắt tiền và được coi là một vật liệu quan trọng; do đó, đầu dò áp điện đã được thay thế. Sonar là một mảng lớn gồm 432 đầu dò riêng lẻ. Lúc đầu, các bộ chuyển đổi không đáng tin cậy, có các lỗi về cơ và điện và xuống cấp ngay sau khi lắp đặt; chúng cũng được sản xuất bởi một số nhà cung cấp, có thiết kế khác nhau và đặc điểm của chúng đủ khác để làm giảm hiệu suất của mảng. Chính sách cho phép sửa chữa các bộ chuyển đổi riêng lẻ sau đó đã bị loại bỏ và thay vào đó, “thiết kế mô-đun có thể sử dụng được”, các mô-đun không thể sửa chữa được niêm phong, đã được chọn.
Hải quân Đế quốc Nhật Bản (IJN) khi bắt đầu Thế chiến II đã sử dụng máy chiếu dựa trên thạch anh. Chúng to và nặng, đặc biệt nếu được thiết kế cho các tần số thấp hơn; cái dành cho bộ Type 91, hoạt động ở tần số 9 kHz, có đường kính 760 mm và được điều khiển bởi một bộ dao động có công suất 5 kW và biên độ đầu ra 7 kV. Các bộ phát Type 93 bao gồm các bánh rắn kẹp thạch anh, được lắp ráp thành các thân bằng gang hình cầu. Các sonar Type 93 sau đó được thay thế bằng Type 3, theo thiết kế của Đức và sử dụng bộ phát từ tính; các bộ phát bao gồm hai thiết bị độc lập hình chữ nhật giống hệt nhau trong một thân hình chữ nhật bằng gang có kích thước khoảng 410 mm × 230 mm. Vùng tiếp xúc rộng bằng 1/2 bước sóng và cao bằng 3 lần bước sóng. Các lõi từ giảo được làm từ niken dập 4 mm, và sau đó là hợp kim sắt-nhôm với hàm lượng nhôm từ 12,7% đến 12,9%. Nguồn điện được cung cấp từ 2 kW ở 3,8 kV, với sự phân cực từ nguồn 20 V, 8 A DC.
Những phát triển sau này trong đầu dò
Các bộ chuyển đổi từ giảo được theo đuổi sau Thế chiến II như một giải pháp thay thế cho các bộ chuyển đổi áp điện. Đầu dò vòng quấn niken được sử dụng cho các hoạt động tần số thấp công suất cao, với kích thước đường kính lên tới 4,0 m, có lẽ là đầu dò sonar riêng lẻ lớn nhất từ trước đến nay. Ưu điểm của kim loại là độ bền kéo cao và trở kháng điện đầu vào thấp, nhưng chúng có tổn thất điện năng và hệ số liên kết thấp hơn so với PZT, có thể tăng độ bền kéo bằng ứng suất trước. Các vật liệu khác cũng đã được thử nghiệm; các ferit phi kim loại hứa hẹn có độ dẫn điện thấp dẫn đến tổn thất dòng điện xoáy thấp, Metglas cung cấp hệ số ghép nối cao, nhưng chúng kém hơn PZT về tổng thể. Vào những năm 1970, các hợp chất của đất hiếm và sắt đã được phát hiện với các đặc tính cơ từ vượt trội, đó là hợp kim Terfenol-D. Điều này làm cho các thiết kế mới có thể thực hiện được, chẳng hạn như bộ chuyển đổi áp điện-từ giảo lai. Vật liệu từ giảo cải tiến gần đây nhất là Galfenol.
Các loại đầu dò khác bao gồm đầu dò biến trở (hoặc phần ứng chuyển động hoặc điện từ), trong đó lực từ tác động lên bề mặt của các khoảng trống và đầu dò cuộn dây chuyển động (hoặc điện động), tương tự như loa thông thường; loại thứ hai được sử dụng trong hiệu chỉnh âm thanh dưới nước, do tần số cộng hưởng rất thấp và các đặc tính băng rộng phẳng phía trên chúng.
Sonar chủ động
Sonar chủ động sử dụng máy phát âm thanh (transmitter hoặc projector) và máy thu. Khi cả hai ở cùng một nơi, đó là hoạt động đơn tĩnh (monostatic operation). Khi máy phát và máy thu được tách ra, đó là hoạt động hai chiều. Khi nhiều máy phát (hoặc nhiều máy thu) được sử dụng, một lần nữa được phân tách về mặt không gian, đó là hoạt động đa tĩnh (multistatic operation). Hầu hết các sonar được sử dụng đơn tĩnh với cùng một mảng thường được sử dụng để truyền và nhận. Các trường sonobuoy đang hoạt động có thể được vận hành đa tĩnh.
Sonar chủ động tạo ra một xung âm thanh, thường được gọi là “ping”, sau đó lắng nghe phản xạ (tiếng vang) của xung đó. Xung âm thanh này thường được tạo ra bằng phương pháp điện tử bằng cách sử dụng bộ phát sonar bao gồm bộ tạo tín hiệu, bộ khuếch đại công suất và đầu dò/mảng điện âm. Đầu dò là một thiết bị có thể truyền và nhận tín hiệu âm thanh (“ping”). Một bộ tạo chùm tia thường được sử dụng để tập trung năng lượng âm thanh vào một chùm tia, chùm tia này có thể được quét để bao phủ các góc tìm kiếm cần thiết. Nói chung, các bộ chuyển đổi điện âm là của loại Tonpilz và thiết kế của chúng có thể được tối ưu hóa để đạt được hiệu quả tối đa trên băng thông rộng nhất, nhằm tối ưu hóa hiệu suất của toàn bộ hệ thống. Đôi khi, xung âm thanh có thể được tạo ra bằng các phương tiện khác, ví dụ như sử dụng chất nổ, súng hơi hoặc nguồn âm thanh plasma về mặt hóa học.
Để đo khoảng cách đến một đối tượng, thời gian từ khi truyền xung đến khi nhận được đo và chuyển đổi thành một phạm vi sử dụng tốc độ âm thanh đã biết. Để đo phương vị, một số ống nghe dưới nước được sử dụng và bộ đo thời gian đến tương đối của từng ống nghe hoặc với một dãy ống nghe dưới nước, bằng cách đo biên độ tương đối trong các chùm được hình thành thông qua một quá trình gọi là tạo chùm tia. Việc sử dụng một mảng làm giảm phản ứng không gian để cung cấp các hệ thống đa tia bao phủ rộng được sử dụng. Tín hiệu mục tiêu (nếu có) cùng với nhiễu sau đó được chuyển qua các dạng xử lý tín hiệu khác nhau, mà đối với sonar đơn giản có thể chỉ là phép đo năng lượng. Sau đó, nó được trình bày cho một số dạng thiết bị quyết định gọi đầu ra là tín hiệu hoặc nhiễu cần thiết. Thiết bị quyết định này có thể là một người vận hành với tai nghe hoặc màn hình, hoặc trong các sonar tinh vi hơn, chức năng này có thể được thực hiện bằng phần mềm. Các quy trình tiếp theo có thể được thực hiện để phân loại mục tiêu và khoanh vùng nó, cũng như đo vận tốc của nó.
Xung có thể ở tần số không đổi hoặc tiếng kêu có tần số thay đổi (để cho phép nén xung khi nhận). Các sonar đơn giản thường sử dụng loại đầu tiên với bộ lọc đủ rộng để che phủ những thay đổi Doppler có thể xảy ra do chuyển động của mục tiêu, trong khi những loại phức tạp hơn thường bao gồm kỹ thuật thứ hai. Kể từ khi xử lý kỹ thuật số trở nên khả dụng, việc nén xung thường được thực hiện bằng các kỹ thuật tương quan kỹ thuật số. Các sonar quân sự thường có nhiều chùm tia để cung cấp khả năng bao quát toàn bộ trong khi những thiết bị đơn giản chỉ bao phủ một vòng cung hẹp, mặc dù chùm tia có thể được quay, tương đối chậm, bằng cách quét cơ học.
Đặc biệt khi sử dụng truyền tần số đơn, hiệu ứng Doppler có thể được sử dụng để đo tốc độ hướng tâm của mục tiêu. Sự khác biệt về tần số giữa tín hiệu truyền và tín hiệu nhận được đo và chuyển đổi thành vận tốc. Vì các dịch chuyển Doppler có thể được đưa vào bởi máy thu hoặc chuyển động của mục tiêu, nên phải tính đến tốc độ hướng tâm của nền tảng tìm kiếm.
Một sonar nhỏ hữu ích có hình dáng tương tự như đèn pin chống nước. Đầu được hướng xuống nước, nhấn nút và thiết bị hiển thị khoảng cách đến mục tiêu. Một biến thể khác là “máy dò cá” hiển thị một màn hình nhỏ với các đàn cá. Một số sonar dân sự (không được thiết kế để tàng hình) có khả năng tiếp cận sonar quân sự đang hoạt động, với màn hình ba chiều của khu vực gần tàu.
Khi sonar hoạt động được sử dụng để đo khoảng cách từ đầu dò đến đáy, nó được gọi là âm vang (echo sounding). Các phương pháp tương tự có thể được sử dụng hướng lên trên để đo sóng.
Sonar chủ động cũng được sử dụng để đo khoảng cách trong nước giữa hai đầu dò sonar hoặc sự kết hợp giữa ống nghe dưới nước (micrô âm thanh dưới nước) và bộ phát (loa âm thanh dưới nước). Khi điện thoại dưới nước/đầu dò nhận được tín hiệu hỏi cụ thể, nó sẽ phản hồi bằng cách truyền tín hiệu trả lời (đáp) cụ thể. Để đo khoảng cách, một đầu dò/máy chiếu truyền tín hiệu hỏi và đo thời gian giữa lần truyền này và nhận tín hiệu trả lời của đầu dò/ống nghe dưới nước khác. Sự khác biệt về thời gian, được tính bằng tốc độ âm thanh trong nước và chia cho hai, là khoảng cách giữa hai nền tảng. Kỹ thuật này, khi được sử dụng với nhiều đầu dò/ống nghe dưới nước/máy chiếu, có thể tính toán vị trí tương đối của các vật thể tĩnh và chuyển động trong nước.
Trong các tình huống chiến đấu, một xung hoạt động có thể bị kẻ thù phát hiện và sẽ tiết lộ vị trí của tàu ngầm ở khoảng cách tối đa gấp đôi mà tàu ngầm có thể tự phát hiện liên lạc và đưa ra manh mối về danh tính của tàu ngầm dựa trên các đặc điểm của ping gửi đi. Vì những lý do này, sonar chủ động thường không được tàu ngầm quân sự sử dụng.
Một loại sonar rất định hướng nhưng hiệu quả thấp (được sử dụng bởi nghề cá, quân sự và an ninh cảng) sử dụng một đặc tính phi tuyến tính phức tạp của nước được gọi là sonar phi tuyến tính (non-linear sonar), bộ chuyển đổi ảo được gọi là mảng tham số (parametric array).
Dự án Artemis
Dự án Artemis là một dự án nghiên cứu và phát triển thử nghiệm vào cuối những năm 1950 đến giữa những năm 1960 để kiểm tra sự lan truyền âm thanh và xử lý tín hiệu cho hệ thống sonar hoạt động tần số thấp có thể được sử dụng để giám sát đại dương. Mục tiêu thứ yếu là kiểm tra các vấn đề kỹ thuật của các hệ thống đáy cố định đang hoạt động. Mảng tiếp nhận được đặt trên sườn của Plantagnet Bank ngoài khơi Bermuda. Mảng nguồn hoạt động được triển khai từ tàu chở dầu USNS Mission Capistrano trong Thế chiến II đã được chuyển đổi. Các yếu tố của Artemis đã được sử dụng trong thực nghiệm sau khi thí nghiệm chính kết thúc.
Bộ hỏi đáp (Transponder)
Đây là một thiết bị sonar hoạt động nhận một kích thích cụ thể và ngay lập tức (hoặc có độ trễ) truyền lại tín hiệu nhận được hoặc tín hiệu được xác định trước. Bộ hỏi đáp có thể được sử dụng để kích hoạt hoặc khôi phục thiết bị dưới biển từ xa.
Dự đoán hiệu suất
Một mục tiêu sonar nhỏ so với hình cầu, tập trung xung quanh bộ phát, trên đó nó được đặt. Do đó, công suất của tín hiệu phản xạ rất thấp, nhỏ hơn vài bậc so với tín hiệu ban đầu. Ngay cả khi tín hiệu phản xạ có cùng công suất, ví dụ sau (sử dụng các giá trị giả định) cho thấy vấn đề: Giả sử hệ thống sonar có khả năng phát ra tín hiệu 10.000 W/m2 ở 1 m và phát hiện tín hiệu 0,001 W/m2 dấu hiệu. Ở 100 m, tín hiệu sẽ là 1 W/m2 (do định luật nghịch đảo bình phương). Nếu toàn bộ tín hiệu được phản xạ từ mục tiêu 10 m2, nó sẽ ở mức 0,001 W/m2 khi nó đến bộ phát, tức là chỉ có thể phát hiện được. Tuy nhiên, tín hiệu ban đầu sẽ duy trì trên 0,001 W/m2 cho đến 3000 m. Bất kỳ mục tiêu 10 m2 nào trong khoảng từ 100 đến 3000 m sử dụng hệ thống tương tự hoặc tốt hơn sẽ có thể phát hiện xung, nhưng bộ phát sẽ không phát hiện được. Các máy dò phải rất nhạy cảm để nhận được tiếng vang. Vì tín hiệu ban đầu mạnh hơn nhiều, nó có thể được phát hiện xa hơn nhiều lần so với hai lần phạm vi của sonar (như trong ví dụ).
Sonar chủ động có hai hạn chế về hiệu suất: do tiếng ồn và âm vang. Nói chung, một hoặc một trong số này sẽ chiếm ưu thế, do đó ban đầu hai tác động có thể được xem xét riêng biệt.
Trong điều kiện hạn chế tiếng ồn khi phát hiện ban đầu:
SL − 2PL + TS − (NL − AG) = DT,
trong đó:
– SL là mức nguồn,
– PL là suy hao lan truyền (đôi khi được gọi là suy hao truyền),
– TS là cường độ mục tiêu,
– NL là mức nhiễu,
– AG là mức tăng mảng của mảng thu (đôi khi xấp xỉ bằng chỉ số định hướng của nó), và
– DT là ngưỡng phát hiện.
Trong các điều kiện giới hạn âm vang khi phát hiện ban đầu (bỏ qua mức tăng mảng):
SL − 2PL + TS = RL + DT,
trong đó: RL là mức âm vang.
Sonar cầm tay để sử dụng bởi một thợ lặn
– LIMIS (limpet mine imaging sonar) – thiết bị định vị thủy âm hình ảnh vỏ ốc nón là thiết bị định vị thủy âm hình ảnh cầm tay hoặc gắn trên ROV để thợ lặn sử dụng. Tên của nó là bởi vì nó được thiết kế cho các thợ lặn tuần tra (biệt kích người nhái hoặc thợ lặn rà phá bom mìn) để tìm kiếm mìn ốc nón (limpet mines) trong vùng nước có tầm nhìn hạn chế.
– LUIS (lensing underwater imaging system) – hệ thống hình ảnh thấu kính dưới nước là một sonar hình ảnh khác để thợ lặn sử dụng.
– Có hoặc đã có một sonar cầm tay hình đèn pin nhỏ dành cho thợ lặn, chỉ hiển thị phạm vi.
– Đối với INSS (integrated navigation sonar system) – hệ thống định vị thủy âm tích hợp.
Sonar hướng lên trên
Sonar hướng lên trên ULS (upward looking sonar) là một thiết bị sonar hướng lên trên nhìn về phía mặt biển. Nó được sử dụng cho các mục đích tương tự như sonar nhìn xuống, nhưng có một số ứng dụng độc đáo như đo độ dày, độ nhám và nồng độ của băng biển, hoặc đo lượng khí bị cuốn vào từ các chùm bong bóng khi biển động. Thường thì nó được thả neo dưới đáy đại dương hoặc trôi nổi trên một dây căng thả neo ở độ sâu không đổi có lẽ là 100 m. Chúng cũng có thể được sử dụng bởi tàu ngầm, AUV, và phao như phao Argo.
Sonar thụ động
Sonar thụ động nghe mà không truyền (thu mà không phát). Nó thường được sử dụng trong môi trường quân sự, mặc dù nó cũng được sử dụng trong các ứng dụng khoa học, ví dụ: phát hiện cá để nghiên cứu sự hiện diện/vắng mặt trong các môi trường nước khác nhau. Trong cách sử dụng rất rộng, thuật ngữ này có thể bao gồm hầu như bất kỳ kỹ thuật phân tích nào liên quan đến âm thanh được tạo ra từ xa, mặc dù nó thường bị hạn chế đối với các kỹ thuật được áp dụng trong môi trường nước.
Xác định nguồn âm thanh
Sonar thụ động có nhiều kỹ thuật khác nhau để xác định nguồn âm thanh được phát hiện. Ví dụ, các tàu của Hoa Kỳ thường vận hành hệ thống điện xoay chiều 60 Hz. Nếu máy biến áp hoặc máy phát điện được lắp đặt mà không có lớp cách ly chống rung thích hợp từ thân tàu hoặc bị ngập nước, thì âm thanh 60 Hz từ các cuộn dây có thể phát ra từ tàu ngầm hoặc tàu thủy. Điều này có thể giúp xác định quốc tịch của nó, vì tất cả các tàu ngầm châu Âu và gần như mọi tàu ngầm của các quốc gia khác đều có hệ thống điện 50 Hz. Nguồn âm thanh không liên tục (chẳng hạn như tiếng cờ lê bị rơi), được gọi là “transients” (tạm thời), cũng có thể được phát hiện bằng sonar thụ động. Cho đến khá gần đây, một nhà điều hành có kinh nghiệm, được đào tạo đã xác định các tín hiệu, nhưng hiện nay máy tính có thể làm điều này.
Các hệ thống sonar thụ động có thể có cơ sở dữ liệu âm thanh lớn, nhưng người vận hành sonar thường phân loại các tín hiệu theo cách thủ công. Một hệ thống máy tính thường xuyên sử dụng các cơ sở dữ liệu này để xác định các loại tàu, hành động (tức là tốc độ của tàu hoặc loại vũ khí được phóng và các biện pháp đối phó hiệu quả nhất để sử dụng) và thậm chí cả các tàu cụ thể.
Hạn chế tiếng ồn
Sonar thụ động trên các phương tiện thường bị hạn chế nghiêm trọng do tiếng ồn mà phương tiện tạo ra. Vì lý do này, nhiều tàu ngầm vận hành lò phản ứng hạt nhân có thể được làm mát mà không cần máy bơm, sử dụng đối lưu không gây tiếng ồn, hoặc pin nhiên liệu hoặc ắc-quy, cũng có thể chạy không tiếng ồn. Chân vịt của tàu cũng được thiết kế và gia công chính xác để phát ra tiếng ồn ở mức tối thiểu. Chân vịt tốc độ cao thường tạo ra những bong bóng nhỏ trong nước và sự xâm thực này có âm thanh riêng biệt.
Các sonar hydrophone có thể được kéo phía sau tàu hoặc tàu ngầm để giảm ảnh hưởng của tiếng ồn do chính phương tiện thủy tạo ra. Các thiết bị được kéo cũng chống lại dòng nhiệt, vì thiết bị có thể được kéo bên trên hoặc bên dưới dòng nhiệt.
Màn hình của hầu hết các sonar thụ động từng là màn hình thác nước hai chiều. Hướng ngang của màn hình là phương vị. Chiều dọc là tần suất, hoặc đôi khi là thời gian. Một kỹ thuật hiển thị khác là mã màu thông tin tần số-thời gian cho phương vị. Các màn hình gần đây hơn được tạo bởi máy tính và bắt chước các màn hình chỉ báo vị trí kế hoạch kiểu radar.
Dự đoán hiệu suất
Không giống như sonar chủ động, chỉ có sự lan truyền một chiều. Do quá trình xử lý tín hiệu khác nhau được sử dụng nên tỷ lệ tín hiệu trên nhiễu tối thiểu có thể phát hiện được sẽ khác nhau. Phương trình xác định hiệu suất của sonar thụ động là:
SL − PL = NL − AG + DT,
trong đó:
– SL là mức nguồn,
– PL là tổn thất lan truyền,
– NL là mức nhiễu,
– AG là mức tăng mảng, và
– DT là ngưỡng phát hiện.
Độ lợi FOM (figure of merit) của một sonar thụ động là:
FOM = SL + AG − (NL + DT).
Yếu tố hiệu suất
Hiệu suất phát hiện, phân loại và định vị của sonar phụ thuộc vào môi trường và thiết bị thu, cũng như thiết bị truyền trong sonar chủ động hoặc nhiễu bức xạ mục tiêu trong sonar thụ động.
Truyền âm thanh
Hoạt động của sonar bị ảnh hưởng bởi sự thay đổi tốc độ âm thanh, đặc biệt là trong mặt phẳng thẳng đứng. Âm thanh di chuyển chậm hơn trong nước ngọt so với trong nước biển, mặc dù sự khác biệt là nhỏ. Tốc độ được xác định bởi mô-đun số lượng lớn và mật độ khối lượng của nước. Mô-đun số lượng lớn bị ảnh hưởng bởi nhiệt độ, tạp chất hòa tan (thường là độ mặn) và áp suất. Hiệu ứng mật độ là nhỏ. Tốc độ của âm thanh (tính bằng feet/giây) xấp xỉ:
4388 + (11,25 × nhiệt độ (tính bằng °F)) + (0,0182 × độ sâu (tính bằng feet)) + độ mặn (tính bằng phần nghìn).
Phương trình gần đúng có nguồn gốc thực nghiệm này khá chính xác đối với nhiệt độ bình thường, nồng độ muối và phạm vi độ sâu của hầu hết các đại dương. Nhiệt độ đại dương thay đổi theo độ sâu, nhưng ở độ sâu từ 30 đến 100 m thường có một sự thay đổi rõ rệt, được gọi là đường đẳng nhiệt, phân chia lớp nước ấm hơn trên bề mặt với vùng nước lạnh, tĩnh lặng tạo nên phần còn lại của đại dương. Điều này có thể làm hỏng sonar, bởi vì âm thanh phát ra từ một phía của đường sinh nhiệt có xu hướng bị uốn cong hoặc khúc xạ qua đường sinh nhiệt. Đường nhiệt độ có thể xuất hiện ở vùng nước ven biển nông hơn. Tuy nhiên, tác động của sóng thường sẽ trộn lẫn cột nước và loại bỏ đường đẳng nhiệt. Áp lực nước cũng ảnh hưởng đến sự truyền âm thanh: áp suất cao hơn làm tăng tốc độ âm thanh, khiến sóng âm thanh khúc xạ ra khỏi khu vực có tốc độ âm thanh cao hơn. Mô hình toán học của khúc xạ được gọi là định luật Snell.
Nếu nguồn âm thanh sâu và các điều kiện phù hợp, sự lan truyền có thể xảy ra trong “kênh âm thanh sâu”. Điều này mang lại tổn thất lan truyền cực thấp cho máy thu trong kênh. Điều này là do bẫy âm thanh trong kênh không bị mất ở các ranh giới. Sự lan truyền tương tự có thể xảy ra trong “ống dẫn bề mặt” trong các điều kiện thích hợp. Tuy nhiên, trong trường hợp này có tổn thất phản xạ trên bề mặt.
Ở vùng nước nông, sự lan truyền nói chung là do phản xạ lặp đi lặp lại ở bề mặt và đáy, nơi có thể xảy ra tổn thất đáng kể.
Sự truyền âm thanh bị ảnh hưởng bởi sự hấp thụ trong chính nước cũng như ở bề mặt và đáy. Sự hấp thụ này phụ thuộc vào tần số, với một số cơ chế khác nhau trong nước biển. Sonar tầm xa sử dụng tần số thấp để giảm thiểu hiệu ứng hấp thụ.
Biển chứa nhiều nguồn tạp âm cản trở tiếng vang hoặc chữ ký mục tiêu mong muốn. Các nguồn tiếng ồn chính là sóng và vận chuyển. Chuyển động của máy thu trong nước cũng có thể gây ra tiếng ồn tần số thấp phụ thuộc vào tốc độ.
Tán xạ
Khi sonar chủ động được sử dụng, hiện tượng tán xạ xảy ra từ các vật thể nhỏ dưới biển cũng như từ đáy và bề mặt. Đây có thể là một nguồn gây nhiễu chính. Sự tán xạ âm thanh này tương tự như sự tán xạ ánh sáng từ đèn pha ô tô trong sương mù: chùm tia bút chì cường độ cao sẽ xuyên qua sương mù ở một mức độ nào đó, nhưng đèn pha có chùm sáng rộng hơn phát ra nhiều ánh sáng theo các hướng không mong muốn, phần lớn trong số đó bị tán xạ trở lại đối với người quan sát, áp đảo phản xạ từ mục tiêu (white-out). Vì những lý do tương tự, sonar chủ động cần truyền trong một chùm tia hẹp để giảm thiểu sự tán xạ.
Sự tán xạ của sonar từ các vật thể (mìn, đường ống, động vật phù du, đặc điểm địa chất, cá…) là cách sonar chủ động phát hiện ra chúng, nhưng khả năng này có thể bị che đậy bằng sự tán xạ mạnh từ các mục tiêu sai hoặc “clutter” (tạp âm). Ở những nơi chúng xảy ra (dưới sóng vỗ; khi tàu lặn; trong khí phát ra từ các vết thấm và rò rỉ dưới đáy biển…), bong bóng khí là nguồn lộn xộn mạnh mẽ và có thể dễ dàng che giấu mục tiêu. TWIPS (Twin Inverted Pulse Sonar) hiện là sonar duy nhất có thể khắc phục vấn đề nhiễu tạp này.
Điều này rất quan trọng vì nhiều cuộc xung đột gần đây đã xảy ra ở các vùng nước ven biển và việc không thể phát hiện xem có mìn hay không gây nguy hiểm và gây chậm trễ cho các tàu quân sự, đồng thời hỗ trợ các đoàn tàu vận tải và tàu buôn đang cố gắng hỗ trợ khu vực sau khi xung đột kết thúc.
Đặc điểm mục tiêu
Các đặc tính phản xạ âm thanh của mục tiêu sonar đang hoạt động, chẳng hạn như tàu ngầm, được gọi là cường độ mục tiêu của nó. Một điều phức tạp là tiếng vang cũng thu được từ các vật thể khác trên biển như cá voi, thức ăn, đàn cá và đá.
Sonar thụ động phát hiện các đặc điểm tiếng ồn bức xạ của mục tiêu. Phổ bức xạ bao gồm phổ nhiễu liên tục với các cực đại ở các tần số nhất định có thể được sử dụng để phân loại.
Biện pháp đối phó
Các biện pháp đối phó chủ động (được hỗ trợ) có thể được thực hiện bởi một tàu đang bị tấn công để tăng mức độ tiếng ồn, cung cấp một mục tiêu giả lớn và che khuất tín hiệu của chính tàu đó.
Các biện pháp đối phó thụ động (nghĩa là không cấp nguồn) bao gồm:
– Gắn thiết bị tạo tiếng ồn trên thiết bị cách ly.
– Lớp phủ hấp thụ âm thanh trên vỏ tàu ngầm, ví dụ như ngói không dội âm.
Ứng dụng quân sự
Tác chiến hải quân hiện đại sử dụng rộng rãi cả sonar thụ động và chủ động từ các tàu, máy bay và các cơ sở cố định trên mặt nước. Mặc dù sonar chủ động đã được tàu mặt nước sử dụng trong Thế chiến II, nhưng các tàu ngầm tránh sử dụng sonar chủ động do khả năng tiết lộ sự hiện diện và vị trí của chúng cho lực lượng đối phương. Tuy nhiên, sự ra đời của quá trình xử lý tín hiệu hiện đại đã cho phép sử dụng sonar thụ động làm phương tiện chính cho các hoạt động tìm kiếm và phát hiện. Năm 1987, một bộ phận của công ty Nhật Bản Toshiba được cho là đã bán máy móc cho Liên Xô cho phép mài cánh chân vịt tàu ngầm của họ để chúng trở nên hoàn toàn yên tĩnh hơn, khiến thế hệ tàu ngầm mới khó bị phát hiện hơn.
Việc tàu ngầm sử dụng sonar chủ động để xác định phương hướng là cực kỳ hiếm và sẽ không nhất thiết cung cấp thông tin về phương hướng hoặc phạm vi chất lượng cao cho nhóm điều khiển hỏa lực của tàu ngầm. Tuy nhiên, việc sử dụng sonar chủ động trên tàu mặt nước rất phổ biến và được sử dụng bởi tàu ngầm khi tình huống chiến thuật cho thấy việc xác định vị trí của tàu ngầm thù địch quan trọng hơn là che giấu vị trí của chính chúng. Với các tàu mặt nước, có thể giả định rằng mối đe dọa đã theo dõi con tàu bằng dữ liệu vệ tinh vì bất kỳ tàu nào xung quanh sonar phát ra sẽ phát hiện ra sự phát xạ. Sau khi nghe thấy tín hiệu, có thể dễ dàng xác định thiết bị sonar được sử dụng (thường là với tần số của nó) và vị trí của nó (với năng lượng của sóng âm thanh). Sonar chủ động giống radar ở chỗ, cho phép phát hiện mục tiêu ở một cự ly nhất định,
Vì sonar chủ động tiết lộ sự hiện diện và vị trí của nguồn phát, đồng thời không cho phép phân loại chính xác mục tiêu, nên nó được sử dụng bởi phương tiện nhanh (máy bay, trực thăng) và phương tiện ồn lớn (hầu hết các tàu mặt nước) nhưng hiếm khi được tàu ngầm sử dụng. Khi sonar chủ động được sử dụng bởi tàu mặt nước hoặc tàu ngầm, nó thường được kích hoạt rất ngắn ở các khoảng thời gian không liên tục để giảm thiểu nguy cơ bị phát hiện. Do đó, sonar chủ động thường được coi là phương án dự phòng cho sonar thụ động. Trên máy bay, sonar chủ động được sử dụng ở dạng phao sonar dùng một lần được thả trong khu vực tuần tra của máy bay hoặc trong vùng lân cận có thể liên lạc với sonar của kẻ thù.
Sonar thụ động có một số lợi thế, quan trọng nhất là nó im lặng. Nếu mức nhiễu bức xạ của mục tiêu đủ cao, nó có thể có phạm vi lớn hơn sonar chủ động và cho phép xác định mục tiêu. Vì bất kỳ phương tiện cơ động nào cũng tạo ra một số tiếng ồn, nên về nguyên tắc, nó có thể bị phát hiện, tùy thuộc vào mức độ tiếng ồn phát ra và mức độ tiếng ồn xung quanh trong khu vực, cũng như công nghệ được sử dụng. Để đơn giản hóa, sonar thụ động “nhìn thấy” xung quanh con tàu bằng cách sử dụng nó. Trên tàu ngầm, sonar thụ động gắn ở mũi tàu phát hiện theo các hướng khoảng 270°, tập trung vào hướng thẳng hàng của tàu, mảng gắn trên thân tàu khoảng 160° ở mỗi bên và mảng được kéo theo toàn bộ 360°. Các khu vực góc khuất là do sự kết cấu của chính con tàu. Khi tín hiệu được phát hiện theo một hướng nhất định (có nghĩa là thứ gì đó phát ra âm thanh theo hướng đó, đây được gọi là phát hiện băng thông rộng), có thể phóng to và phân tích tín hiệu nhận được (phân tích băng thông hẹp). Điều này thường được thực hiện bằng cách sử dụng biến đổi Fourier để hiển thị các tần số khác nhau tạo nên âm thanh. Vì mỗi động cơ tạo ra một âm thanh cụ thể nên việc xác định đối tượng tương đối dễ dàng. Cơ sở dữ liệu về âm thanh động cơ độc đáo là một phần của cái được gọi là trí thông minh âm thanh (acoustic intelligence) hoặc ACINT.
Một cách sử dụng khác của sonar thụ động là xác định quỹ đạo của mục tiêu. Quá trình này được gọi là phân tích chuyển động mục tiêu TMA (target motion analysis) và “giải pháp” kết quả là phạm vi, hướng đi và tốc độ của mục tiêu. TMA được thực hiện bằng cách đánh dấu hướng mà âm thanh phát ra vào các thời điểm khác nhau và so sánh chuyển động với chuyển động của chính con tàu của người điều khiển. Những thay đổi trong chuyển động tương đối được phân tích bằng cách sử dụng các kỹ thuật hình học tiêu chuẩn cùng với một số giả định về các trường hợp giới hạn.
Sonar thụ động là tàng hình và rất hữu ích. Tuy nhiên, nó đòi hỏi các linh kiện điện tử công nghệ cao và tốn kém. Nó thường được triển khai trên các tàu đắt tiền dưới dạng mảng (array) để tăng cường khả năng phát hiện. Tàu mặt nước sử dụng nó để có hiệu quả tốt; nó thậm chí còn được sử dụng tốt hơn bởi tàu ngầm, và nó cũng được sử dụng bởi máy bay và trực thăng, chủ yếu là để tạo “hiệu ứng bất ngờ” (surprise effect), vì tàu ngầm có thể ẩn mình dưới các lớp nhiệt. Nếu chỉ huy tàu ngầm tin rằng anh ta chỉ có một mình, anh ta có thể đưa tàu của mình đến gần mặt nước hơn để dễ phát hiện hơn, hoặc đi sâu hơn và nhanh hơn, do đó tạo ra nhiều âm thanh hơn.
Ví dụ về các ứng dụng sonar trong sử dụng quân sự được đưa ra dưới đây. Nhiều mục đích sử dụng dân sự được đưa ra trong phần sau đây cũng có thể được áp dụng cho mục đích sử dụng hải quân.
Tác chiến chống ngầm (ASW)
Cho đến gần đây, sonar trên tàu thường được chế tạo với các mảng gắn trên thân tàu, ở giữa tàu hoặc ở mũi tàu. Sau lần sử dụng đầu tiên, người ta đã sớm nhận ra rằng cần phải có một phương tiện giảm tiếng ồn của dòng chảy. Những cái đầu tiên được làm bằng vải bạt trên khung, sau đó những cái bằng thép được sử dụng. Bây giờ mái vòm thường được làm bằng nhựa gia cố hoặc cao su chịu áp lực. Các sonar như vậy chủ yếu hoạt động một cách chiến thuật. Một ví dụ về sonar gắn trên thân thông thường là SQS-56.
Do các vấn đề về tiếng ồn của tàu, sonar kéo cũng được sử dụng. Chúng có lợi thế là có thể được đặt sâu hơn trong nước, nhưng có những hạn chế khi sử dụng chúng ở vùng nước nông. Chúng được gọi là sonar mảng kéo (tuyến tính) hoặc sonar độ sâu thay đổi VDS (variable depth sonar) với mảng 2/3D. Một vấn đề là tời cần thiết để triển khai/thu hồi chúng rất lớn và đắt tiền. Các bộ VDS cơ bản là chủ động, trong khi các mảng được kéo là thụ động.
Ngư lôi
Ngư lôi hiện đại thường được trang bị sonar chủ động/thụ động. Điều này có thể được sử dụng để nhắm trực tiếp vào mục tiêu, nhưng ngư lôi tự dẫn cũng được sử dụng. Một ví dụ ban đầu về tự dẫn âm thanh là ngư lôi Mark 37.
Các biện pháp đối phó ngư lôi có thể được kéo đi hoặc thả tự do. Một ví dụ ban đầu là thiết bị Sieglinde của Đức trong khi Bold là thiết bị hóa học. Một thiết bị được sử dụng rộng rãi của Hoa Kỳ là AN/SLQ-25 Nixie được kéo trong khi thiết bị mô phỏng tàu ngầm di động (MOSS) là một thiết bị tự do. Một giải pháp thay thế hiện đại cho hệ thống Nixie là hệ thống Phòng thủ ngư lôi S2170 của Hải quân Hoàng gia Anh (RN).
Mìn (thủy lôi)
Thủy lôi có thể được gắn sonar để phát hiện, định vị và nhận dạng mục tiêu cần thiết. Một ví dụ là mìn CAPTOR.
Biện pháp đối phó của mìn
Sonar đối phó mìn MCM (mine countermeasure), đôi khi được gọi là “mine and obstacle avoidance sonar” – sonar tránh mìn và chướng ngại vật (MOAS), là một loại sonar chuyên dụng được sử dụng để phát hiện các vật thể nhỏ. Hầu hết các sonar MCM được gắn trên thân tàu nhưng một số loại là thiết kế VDS. Một ví dụ về sonar MCM gắn trên thân tàu là Type 2193 trong khi sonar săn mìn SQQ-32 và các hệ thống Type 2093 là thiết kế của sonar độ sâu thay đổi (VDS).
Điều hướng tàu ngầm
Tàu ngầm dựa vào sonar ở mức độ lớn hơn so với tàu mặt nước vì chúng không thể sử dụng radar trong nước. Các mảng sonar có thể được gắn trên thân tàu hoặc được kéo theo. Thông tin trang bị trên các trang bị điển hình được đưa ra trong tàu ngầm lớp Oyashio và tàu ngầm lớp Swiftsure.
Phi cơ
Máy bay trực thăng có thể được sử dụng cho tác chiến chống ngầm bằng cách triển khai các trường phao thủy âm vô tuyến (sonobuoy) chủ động-thụ động hoặc có thể vận hành sonar nhúng, chẳng hạn như AQS-13. Máy bay cánh cố định cũng có thể triển khai sonobuoys và có độ bền cũng như khả năng triển khai chúng cao hơn. Quá trình xử lý từ sonobuoys hoặc sonar nhúng có thể được thực hiện trên máy bay hoặc trên tàu. Sonar nhúng có lợi thế là có thể triển khai ở độ sâu phù hợp với điều kiện hàng ngày. Máy bay trực thăng cũng đã được sử dụng cho các nhiệm vụ đối phó với mìn bằng cách sử dụng sonar kéo như AQS-20A.
Thông tin liên lạc dưới nước
Sonar chuyên dụng có thể được trang bị cho tàu mặt nước và tàu ngầm để liên lạc dưới nước.
Giám sát đại dương
Hoa Kỳ đã bắt đầu một hệ thống giám sát đại dương thụ động, cố định vào năm 1950 với tên được phân loại là Hệ thống Giám sát Âm thanh SOSUS (Sound Surveillance System) với Công ty Điện thoại và Điện báo Hoa Kỳ (AT&T), với các đơn vị nghiên cứu của Phòng thí nghiệm Bell và các đơn vị sản xuất của Western Electric được ký hợp đồng phát triển và cài đặt. Các hệ thống đã khai thác kênh SOFAR (sound fixing and ranging), còn được gọi là kênh âm thanh sâu, trong đó tốc độ âm thanh tối thiểu tạo ra một ống dẫn sóng trong đó âm thanh tần số thấp truyền đi hàng nghìn dặm. Phân tích dựa trên máy quang phổ âm thanh AT&T, giúp chuyển đổi âm thanh thành quang phổ hình ảnh đại diện cho phân tích tần số thời gian của âm thanh được phát triển để phân tích giọng nói và được sửa đổi để phân tích âm thanh tần số thấp dưới nước. Quá trình đó là Phân tích và ghi tần số thấp và thiết bị được gọi là Máy phân tích và ghi tần số thấp (Low Frequency Analysis and Recording), cả hai đều có từ viết tắt LOFAR. Nghiên cứu của LOFAR được đặt tên là Jezebel và dẫn đến việc sử dụng trong các hệ thống không khí và bề mặt, đặc biệt là phao siêu âm sử dụng quy trình và đôi khi sử dụng “Jezebel” trong tên của chúng. Hệ thống được đề xuất đưa ra hứa hẹn về khả năng phát hiện tàu ngầm tầm xa đến mức Hải quân đã ra lệnh triển khai ngay lập tức.
Giữa quá trình lắp đặt một dàn thử nghiệm, sau đó là một dàn hoạt động nguyên mẫu, 40 phần tử, quy mô đầy đủ vào năm 1951 và 1958, các hệ thống đã được lắp đặt ở Đại Tây Dương và sau đó là Thái Bình Dương với tên được biết đến là Dự án Caesar. Các hệ thống ban đầu đã bị chấm dứt tại các trạm bờ được phân loại được chỉ định là Cơ sở Hải quân NAVFAC (Naval Facility) được giải thích là tham gia vào “nghiên cứu đại dương” để thực hiện nhiệm vụ được phân loại của họ. Hệ thống đã được nâng cấp nhiều lần với cáp tiên tiến hơn cho phép các mảng được lắp đặt trong các lưu vực đại dương và nâng cấp quá trình xử lý. Các trạm trên bờ đã bị loại bỏ trong quá trình hợp nhất và định tuyến lại các mảng đến các trung tâm xử lý trung tâm vào những năm 1990. Năm 1985, với các mảng di động mới và các hệ thống khác đang hoạt động, tên hệ thống tập thể đã được đổi thành Hệ thống giám sát dưới biển tích hợp IUSS (Integrated Undersea Surveillance System). Năm 1991 nhiệm vụ của hệ thống được giải mật. Năm trước khi phù hiệu IUSS được phép mặc. Truy cập đã được cấp cho một số hệ thống cho nghiên cứu khoa học.
Một hệ thống tương tự được cho là đã được vận hành bởi Liên Xô.
An ninh dưới nước
Sonar có thể được sử dụng để phát hiện người nhái và thợ lặn. Điều này có thể được áp dụng xung quanh tàu hoặc tại lối vào cảng. Sonar chủ động cũng có thể được sử dụng như một cơ chế ngăn chặn và/hoặc vô hiệu hóa. Một thiết bị như vậy là hệ thống Cerberus.
Sonar cầm tay
Sonar ghi ảnh mìn Limpet (LIMIS) là một sonar ghi ảnh cầm tay hoặc gắn trên ROV được thiết kế cho các thợ lặn tuần tra (người nhái chiến đấu hoặc thợ lặn rà phá bom mìn) để tìm kiếm mìn Limpet trong vùng nước có tầm nhìn hạn chế.
LUIS là một sonar hình ảnh khác để thợ lặn sử dụng.
Hệ thống sonar định vị tích hợp (INSS) là một sonar cầm tay nhỏ hình đèn pin dành cho thợ lặn hiển thị phạm vi.
Sonar đánh chặn
Đây là một sonar được thiết kế để phát hiện và định vị các đường truyền từ các sonar đang hoạt động của kẻ thù. Một ví dụ về điều này là Type 2082 được trang bị trên các tàu ngầm lớp Vanguard của Anh.
Ứng dụng dân sự
Thủy sản
Đánh bắt cá là một ngành công nghiệp quan trọng đang có nhu cầu ngày càng tăng, nhưng sản lượng đánh bắt trên thế giới đang giảm do các vấn đề tài nguyên nghiêm trọng. Ngành công nghiệp phải đối mặt với một tương lai tiếp tục hợp nhất trên toàn thế giới cho đến khi có thể đạt được điểm bền vững. Tuy nhiên, việc hợp nhất các đội tàu đánh cá đang thúc đẩy nhu cầu ngày càng tăng đối với các thiết bị điện tử tìm cá tinh vi như cảm biến, máy đo âm thanh và sonar. Trong lịch sử, ngư dân đã sử dụng nhiều kỹ thuật khác nhau để tìm và thu hoạch cá. Tuy nhiên, công nghệ âm thanh là một trong những động lực quan trọng nhất đằng sau sự phát triển của nghề cá thương mại hiện đại.
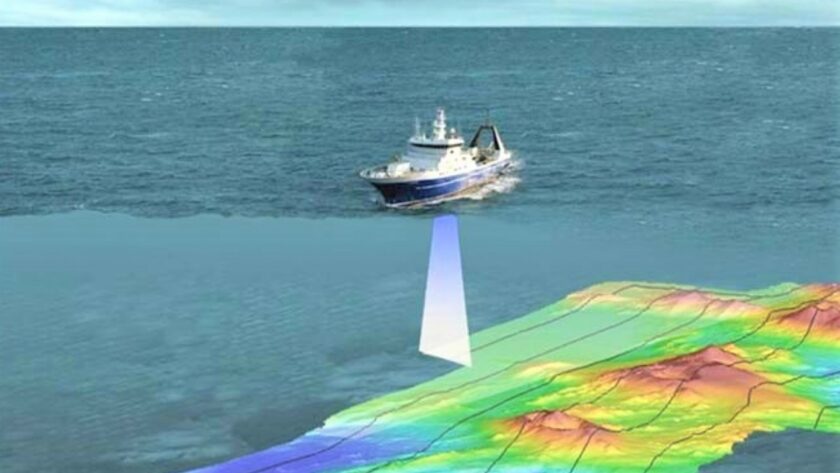
Sóng âm truyền qua cá khác với trong nước vì bong bóng bơi chứa đầy không khí của cá có tỷ trọng khác với nước biển. Sự khác biệt mật độ này cho phép phát hiện các đàn cá bằng cách sử dụng âm thanh phản xạ. Công nghệ âm thanh đặc biệt phù hợp với các ứng dụng dưới nước vì âm thanh truyền dưới nước xa hơn và nhanh hơn so với trong không khí. Ngày nay, các tàu đánh cá thương mại gần như hoàn toàn dựa vào sonar và máy đo âm thanh để phát hiện cá. Ngư dân cũng sử dụng công nghệ sonar chủ động và máy đo tiếng vang để xác định độ sâu của nước, đường viền đáy và thành phần đáy.
Các công ty như eSonar, Raymarine, Marport Canada, Wesmar, Furuno, Krupp và Simrad sản xuất nhiều loại sonar và dụng cụ âm thanh cho ngành đánh bắt cá thương mại ở biển sâu. Ví dụ, các cảm biến lưới thực hiện các phép đo khác nhau dưới nước và truyền thông tin trở lại bộ thu trên tàu. Mỗi cảm biến được trang bị một hoặc nhiều bộ chuyển đổi âm thanh tùy thuộc vào chức năng cụ thể của nó. Dữ liệu được truyền từ các cảm biến bằng phép đo từ xa âm thanh không dây và được nhận bởi một ống nghe dưới nước gắn trên thân tàu. Các tín hiệu tương tự được giải mã và chuyển đổi bằng máy thu âm thanh kỹ thuật số thành dữ liệu được truyền đến máy tính cầu nối để hiển thị đồ họa trên màn hình có độ phân giải cao.
Âm vang
Đo âm vang là một quá trình được sử dụng để xác định độ sâu của nước bên dưới đáy tàu, thuyền. Một loại sonar chủ động, đo âm vang là quá trình truyền xung âm thanh trực tiếp xuống đáy biển, đo thời gian giữa quá trình truyền và phản hồi tiếng vang, sau khi chạm đáy và dội ngược trở lại con tàu ban đầu. Xung âm thanh được phát ra bởi một bộ chuyển đổi cũng nhận được tiếng vang trở lại. Phép đo độ sâu được tính bằng cách nhân tốc độ âm thanh trong nước (trung bình 1.500 m/s) với thời gian giữa phát xạ và phản hồi tiếng vang.
Giá trị của âm thanh dưới nước đối với ngành đánh bắt cá đã dẫn đến sự phát triển của các công cụ âm thanh khác hoạt động theo cách tương tự như máy đo tiếng vang, nhưng vì chức năng của chúng hơi khác so với mô hình ban đầu của máy đo tiếng vang nên đã được đưa ra những điều kiện khác biệt.
Vị trí lưới
Máy đo âm thanh lưới là một máy đo tiếng vang có đầu dò gắn trên đầu lưới chứ không phải dưới đáy tàu. Tuy nhiên, để phù hợp với khoảng cách từ đầu dò đến thiết bị hiển thị, lớn hơn nhiều so với khoảng cách trong máy đo tiếng vang thông thường, cần phải thực hiện một số tinh chỉnh. Có hai loại chính. Đầu tiên là loại cáp trong đó tín hiệu được gửi dọc theo cáp. Trong trường hợp này, phải cung cấp trống cáp để kéo, bắn và xếp cáp trong các giai đoạn khác nhau của hoạt động. Loại thứ hai là thiết bị phát âm lưới không cần cáp – chẳng hạn như Marport’s Trawl Explorer – trong đó các tín hiệu được gửi bằng âm thanh giữa lưới và thiết bị thu âm dưới nước gắn trên thân tàu tàu.
Màn hình trên thiết bị đo độ sâu của lưới hiển thị khoảng cách của lưới từ đáy (hoặc bề mặt), chứ không phải độ sâu của nước như với đầu dò gắn trên thân tàu của thiết bị đo độ vang. Được cố định vào tiêu đề của lưới, người ta thường có thể nhìn thấy đường đi bộ cho biết hiệu suất của lưới. Bất kỳ con cá nào đi vào lưới cũng có thể được nhìn thấy, cho phép thực hiện các điều chỉnh tốt để bắt được nhiều cá nhất có thể. Trong các nghề cá khác, nơi mà số lượng cá trong lưới là quan trọng, các bộ chuyển đổi cảm biến đánh bắt được gắn ở các vị trí khác nhau trên phần cuối của lưới. Khi đầu mã hóa đầy, các bộ chuyển đổi cảm biến đánh bắt này được kích hoạt từng cái một và thông tin này được truyền bằng âm thanh để hiển thị màn hình trên cầu tàu. Sau đó, thuyền trưởng có thể quyết định thời điểm kéo lưới.
Các phiên bản hiện đại của máy dò lưới, sử dụng nhiều bộ chuyển đổi phần tử, hoạt động giống như một sonar hơn là máy đo tiếng vang và hiển thị các lát cắt của khu vực phía trước lưới chứ không chỉ là chế độ xem thẳng đứng mà các máy dò lưới ban đầu đã sử dụng.
Sonar là một thiết bị đo tiếng vang có khả năng định hướng có thể phát hiện cá hoặc các vật thể khác xung quanh tàu.
ROV và UUV
Các sonar nhỏ đã được trang bị cho các phương tiện điều khiển từ xa ROV (remotely operated vehicles) và phương tiện không người lái dưới nước UUV (unmanned underwater vehicles) để cho phép chúng hoạt động trong điều kiện âm u. Những sonar này được sử dụng để quan sát phía trước xe. Hệ thống trinh sát bom mìn dài hạn là một UUV cho mục đích MCM (chống mìn).
Vị trí phương tiện
Sonar hoạt động như đèn hiệu được trang bị cho phương tiện để xác định vị trí của chúng trong trường hợp va chạm trên biển. Các sonar cơ bản ngắn và dài có thể được sử dụng để xác định vị trí, chẳng hạn như đường cơ sở dài LBL (long baseline).
Chân tay giả cho người khiếm thị
Vào năm 2013, một nhà phát minh ở Hoa Kỳ đã tiết lộ một bộ đồ bó sát “có cảm giác như nhện”, được trang bị cảm biến siêu âm và hệ thống phản hồi xúc giác, giúp cảnh báo người mặc về các mối đe dọa sắp tới; cho phép họ phản ứng lại những kẻ tấn công ngay cả khi bị bịt mắt.
Ứng dụng khoa học
Ước tính sinh khối
Phát hiện cá, các sinh vật biển và thủy sinh khác, đồng thời ước tính kích thước cá thể hoặc tổng sinh khối của chúng bằng các kỹ thuật sonar chủ động. Khi xung âm thanh di chuyển trong nước, nó gặp các vật thể có mật độ hoặc đặc điểm âm thanh khác với môi trường xung quanh, chẳng hạn như cá, phản xạ âm thanh trở lại nguồn âm thanh. Những tiếng vang này cung cấp thông tin về kích thước, vị trí, sự phong phú và hành vi của cá. Dữ liệu thường được xử lý và phân tích bằng nhiều phần mềm như Echoview.
Đo sóng
Có thể sử dụng máy đo sâu hồi âm hướng lên trên gắn ở đáy hoặc trên bệ để đo chiều cao và chu kỳ sóng. Từ số liệu thống kê này về các điều kiện bề mặt tại một vị trí có thể được rút ra.
Đo vận tốc nước
Các sonar tầm ngắn đặc biệt đã được phát triển để cho phép đo vận tốc nước.
Đánh giá loại đáy
Sonar đã được phát triển có thể được sử dụng để mô tả đáy biển bùn, cát và sỏi chẳng hạn. Các sonar tương đối đơn giản như máy đo sâu hồi âm có thể được đưa vào các hệ thống phân loại đáy biển thông qua các mô-đun bổ sung, chuyển đổi các tham số hồi âm thành loại trầm tích. Các thuật toán khác nhau tồn tại, nhưng tất cả chúng đều dựa trên những thay đổi về năng lượng hoặc hình dạng của tiếng ping âm thanh phản xạ. Có thể đạt được phân tích phân loại chất nền nâng cao bằng cách sử dụng máy đo tiếng vang (khoa học) đã hiệu chuẩn và phân tích tham số hoặc logic mờ của dữ liệu âm học.
Lập bản đồ độ sâu
Sonar quét bên có thể được sử dụng để lấy bản đồ địa hình đáy biển (đo độ sâu) bằng cách di chuyển sonar qua nó ngay phía trên đáy. Các sonar tần số thấp như GLORIA đã được sử dụng cho các khảo sát rộng khắp thềm lục địa trong khi các sonar tần số cao được sử dụng cho các khảo sát chi tiết hơn ở các khu vực nhỏ hơn.
Hồ sơ dưới đáy
Máy đo tiếng vang tần số thấp mạnh mẽ đã được phát triển để cung cấp hồ sơ của các lớp trên của đáy đại dương. Một trong những thiết bị gần đây nhất là SBP đa tham số đầu dò SES-2000 quattro của Innomar, được sử dụng ví dụ ở Vịnh Puck cho mục đích khảo cổ học dưới nước
Phát hiện rò rỉ khí gas từ đáy biển
Bong bóng khí có thể rò rỉ từ đáy biển hoặc gần nó từ nhiều nguồn. Chúng có thể được phát hiện bởi cả sonar thụ động và chủ động (được hiển thị trong hình sơ đồ bằng các hệ thống màu vàng và màu đỏ tương ứng).
Sự rò rỉ tự nhiên của khí mê-tan và carbon dioxide xảy ra. Các đường ống dẫn khí đốt có thể bị rò rỉ và điều quan trọng là có thể phát hiện xem rò rỉ có xảy ra từ các Cơ sở Lưu trữ và Thu hồi Carbon (CCSF; ví dụ như các giếng dầu cạn kiệt để lưu trữ carbon trong khí quyển được chiết xuất hay không). Định lượng lượng khí rò rỉ là khó khăn, và mặc dù ước tính có thể được thực hiện bằng cách sử dụng sonar chủ động và thụ động, điều quan trọng là phải đặt câu hỏi về độ chính xác của chúng do các giả định vốn có trong việc đưa ra ước tính như vậy từ dữ liệu sonar.
Sonar khẩu độ tổng hợp
Nhiều sonar khẩu độ tổng hợp khác nhau đã được chế tạo trong phòng thí nghiệm và một số đã được đưa vào sử dụng trong các hệ thống tìm kiếm và săn mìn. Một lời giải thích về hoạt động của chúng được đưa ra trong sonar khẩu độ tổng hợp.
Sonar tham số
Các nguồn tham số sử dụng tính phi tuyến tính của nước để tạo ra tần số chênh lệch giữa hai tần số cao. Một mảng kết thúc ảo được hình thành. Một máy chiếu như vậy có lợi thế về băng thông rộng, độ rộng chùm tia hẹp và khi được phát triển đầy đủ và đo lường cẩn thận, nó không có các thùy bên rõ ràng: xem Mảng tham số. Nhược điểm chính của nó là hiệu quả rất thấp chỉ vài phần trăm. PJ Westervelt tóm tắt các xu hướng liên quan.
Sonar trong bối cảnh ngoài trái đất
Việc sử dụng cả sonar thụ động và chủ động đã được đề xuất cho nhiều mục đích sử dụng ngoài trái đất. Một ví dụ về việc sử dụng sonar chủ động là xác định độ sâu của biển hydrocarbon trên Titan.
Người ta đã lưu ý rằng những đề xuất đề xuất sử dụng sonar mà không tính đến sự khác biệt giữa môi trường Trái đất (khí quyển, đại dương, khoáng chất) và môi trường ngoài trái đất, có thể dẫn đến các giá trị sai lầm.
Tác động sinh thái
Ảnh hưởng đến động vật biển có vú
Nghiên cứu đã chỉ ra rằng việc sử dụng sonar chủ động có thể dẫn đến sự mắc cạn hàng loạt của các loài động vật có vú ở biển. Cá voi mõm khoằm, nạn nhân phổ biến nhất khi mắc cạn, đã được chứng minh là rất nhạy cảm với sonar hoạt động tần số trung bình. Các động vật có vú ở biển khác như cá voi xanh cũng chạy trốn khỏi nguồn sonar, trong khi hoạt động hải quân được cho là nguyên nhân có thể xảy ra nhất khiến cá heo mắc cạn hàng loạt. Hải quân Hoa Kỳ, đơn vị tài trợ một phần cho một số nghiên cứu, nói rằng những phát hiện này chỉ cho thấy các phản ứng hành vi đối với sonar, không gây hại thực sự, nhưng họ “sẽ đánh giá hiệu quả của các biện pháp bảo vệ động vật có vú dưới biển dựa trên những phát hiện nghiên cứu mới”. Một phán quyết của Tòa án Tối cao Hoa Kỳ năm 2008 về việc sử dụng sonar của Hải quân Hoa Kỳ lưu ý rằng không có trường hợp nào mà sonar được chứng minh là đã gây hại hoặc giết chết một loài động vật có vú ở biển.
Một số động vật biển, chẳng hạn như cá voi và cá heo, sử dụng hệ thống định vị bằng tiếng vang, đôi khi được gọi là sóng siêu âm sinh học để xác định vị trí kẻ săn mồi và con mồi. Nghiên cứu về tác động của sonar đối với cá voi xanh ở Nam California Bight cho thấy việc sử dụng sonar tần số trung bình làm gián đoạn hành vi kiếm ăn của cá voi. Điều này chỉ ra rằng sự gián đoạn việc cho ăn và sự dịch chuyển khỏi các miếng mồi chất lượng cao do sonar gây ra có thể có những tác động đáng kể và chưa được ghi nhận trước đây đối với hệ sinh thái tìm kiếm cá voi tấm sừng hàm, thể lực cá nhân và sức khỏe quần thể.
Một đánh giá bằng chứng về việc cá voi mõm khoằm mắc cạn hàng loạt có liên quan đến các cuộc tập trận hải quân nơi sử dụng sonar đã được xuất bản vào năm 2019. Nó kết luận rằng tác động của sonar hoạt động tần số trung bình là mạnh nhất đối với cá voi mõm khoằm Cuvier nhưng khác nhau giữa các cá thể hoặc quần thể. Đánh giá cho thấy cường độ phản ứng của từng động vật có thể phụ thuộc vào việc chúng có tiếp xúc với sonar trước đó hay không và các triệu chứng của bệnh giảm áp đã được tìm thấy ở những con cá voi mắc cạn có thể là kết quả của phản ứng như vậy đối với sonar. Nó lưu ý rằng ở Quần đảo Canary, nơi nhiều vụ mắc cạn đã được báo cáo trước đó, không có thêm vụ mắc cạn hàng loạt nào xảy ra sau khi các cuộc tập trận hải quân trong đó sử dụng sonar bị cấm trong khu vực và khuyến nghị lệnh cấm được mở rộng sang các khu vực khác nơi vẫn tiếp tục xảy ra mắc cạn hàng loạt.
Ảnh hưởng đến cá
Âm thanh sonar cường độ cao có thể tạo ra một sự thay đổi nhỏ tạm thời trong ngưỡng nghe của một số loài cá.
Tần suất và độ phân giải
Tần số của sonar dao động từ hạ âm đến trên 1 MHz. Nói chung, các tần số thấp hơn có phạm vi dài hơn, trong khi các tần số cao hơn cung cấp độ phân giải tốt hơn và kích thước nhỏ hơn cho một hướng nhất định.
Để đạt được hướng hợp lý, tần số dưới 1 kHz thường yêu cầu kích thước lớn, thường đạt được dưới dạng mảng kéo.
Sonar tần số thấp được định nghĩa một cách lỏng lẻo là 1-5 kHz, mặc dù một số lực lượng hải quân coi 5-7 kHz cũng là tần số thấp. Tần số trung bình được định nghĩa là 5-15 kHz. Một kiểu phân chia khác coi tần số thấp là dưới 1 kHz và tần số trung bình là từ 1-10 kHz.
Các sonar thời Thế chiến II của Mỹ hoạt động ở tần số tương đối cao 20-30 kHz, để đạt được tính định hướng với các đầu dò nhỏ hợp lý, với phạm vi hoạt động tối đa điển hình là 2500 yd. Sonar sau chiến tranh sử dụng tần số thấp hơn để đạt được tầm xa hơn; ví dụ: SQS-4 hoạt động ở 10 kHz với phạm vi lên tới 5000 yd. SQS-26 và SQS-53 hoạt động ở tần số 3 kHz với phạm vi lên tới 20.000 yd; mái vòm của chúng có kích thước xấp xỉ con thuyền 60 ft, giới hạn kích thước trên đối với sonar thân tàu thông thường. Cho đến nay, việc đạt được kích thước lớn hơn bằng mảng sonar phù hợp trải rộng trên thân tàu vẫn chưa hiệu quả, do đó, các mảng tuyến tính hoặc kéo theo tần số thấp hơn được sử dụng.
Các sonar Thế chiến II của Nhật Bản hoạt động ở nhiều tần số. Type 91, với máy chiếu thạch anh 30 inch, hoạt động ở tần số 9 kHz. Type 93, với các máy chiếu thạch anh nhỏ hơn, hoạt động ở tần số 17,5 kHz (Type 5 ở mức từ giảo 16 hoặc 19 kHz) ở công suất từ 1,7 đến 2,5 kW, với phạm vi lên tới 6 km. Type 3 sau này, với các bộ chuyển đổi từ tính do Đức thiết kế, hoạt động ở 13, 14,5, 16 hoặc 20 kHz (tùy theo kiểu), sử dụng bộ chuyển đổi đôi (ngoại trừ Type 1 có ba bộ chuyển đổi đơn), ở mức 0,2 đến 2,5 kW. Loại đơn giản sử dụng đầu dò từ tính 14,5 kHz ở 0,25 kW, được điều khiển bằng phóng điện dung thay vì bộ dao động, với phạm vi lên tới 2,5 km.
Độ phân giải của sonar là góc cạnh; các đối tượng ở xa hơn được chụp ảnh với độ phân giải thấp hơn so với các đối tượng ở gần.
Một nguồn khác liệt kê phạm vi và độ phân giải so với tần số cho sonar quét hai bên. 30 kHz cung cấp độ phân giải thấp với phạm vi 1000-6000 m, 100 kHz cho độ phân giải trung bình ở 500-1000 m, 300 kHz cho độ phân giải cao ở 150-500 m và 600 kHz cho độ phân giải cao ở 75-150 m. Các sonar tầm xa hơn bị ảnh hưởng bất lợi hơn bởi sự không đồng nhất của nước. Một số môi trường, điển hình là vùng nước nông gần bờ, có địa hình phức tạp với nhiều đặc điểm; tần số cao hơn trở nên cần thiết ở đó./.


